| infotek |
2023-04-12 08:26 |
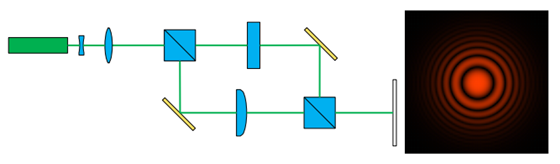
使用相干光模拟马赫泽德干涉仪
测量系统 ?Bo�?JMV�
�0cHf�xy3
应用示例简述 9�ky7r;�?�
�+�7�,��8w
1. 系统说明 o^3FL||P#r
�^>C�1�1�v
光源 ev9;���L�d
— 氦氖激光器(波长632.8nm;相干长度>1m) � %BU���EX
元件 Z�&_y0W=t�
— 分束器和合束器,消色差准直透镜系统,位相延迟器,待测球面透镜 "`pN�H�'��
探测器 D^Te�%q�nW
— 干涉条纹 !;�� IJ ��
建模/设计 {P-xCmZ~Wt
— 光线追迹:初始系统概览 �{m[��s<A(
— 几何场追迹加(GFT+): 93�j{�.0]X
计算干涉条纹。 �8{�dEp�V*
分析对齐误差的影响。 6�?�N4l ]l
v����?�L��
2. 系统说明 ZWO)�tVw9G
U4BqO�
:sd
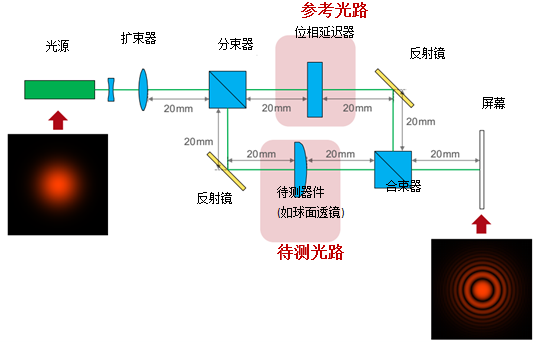
参考光路 \��K�;op2�  yL6^\���x�
3. 建模/设计结果 ��dL-i)�F
o�\Uu�?.-<
 cFK @3a��� cFK @3a���
;j{7�!GeKa
马赫泽德干涉仪的干涉图样的计算 ]4`t�\Y�aT
yGxv?%%��2
1. 仿真 #��ly@;!M�
以光线追迹对干涉仪的仿真。 @Br
{!#�Wf
2. 计算 O�sQ�kA�2=
采用几何场追迹+引擎以计算干涉图样。 d+;gw�*_Ei
3. 研究 �l4rM�k^>>
不同对齐误差在干涉图上的影响,如倾斜和偏移 7Y�1GUIRa3
=.��*�9��8
利用VirtualLab软件可对马赫泽德干涉仪生成的干涉图案进行研究分析。 �`0�{ S3�v
kbYeV_O�wM
应用示例详细内容 &�SH1q_&BQ
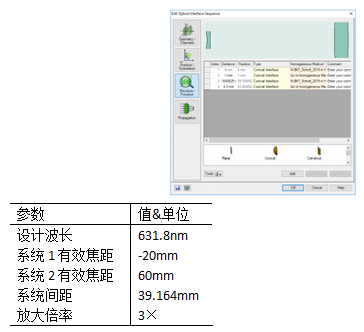
系统参数 5u r)uz]w8
1. 仿真任务:马赫泽德干涉仪 !nd*W"_gQ/
�03k?:�D+5
通过使用这种干涉仪设置,可测量两完全相同光束线间的相对相移。 "X04mQ�n15
�.Pe9_ZH$W
这使得可以对一个样品元件引起的相移进行研究。 s��Yqg�XE.
��]N�^*�tO
2. 说明:光源 }���s_hD`'
{���hQ6K)s
�wG��1l+^p
使用一个频率稳定、单模氦氖激光器。 -Fx�m��s�i
因此,相干长度大于1m 9@K�.cdRjQ
此外,由于发散角很小,所以不需要额外的准直系统。 �bU�Z_U��W
在入射干涉仪之前,高斯波以瑞利长度传播。 1��D� F/6y
H6K`\8/SeN
 S|�em[D[Y^ S|�em[D[Y^
r�v>^TR*,!
3. 说明:光源 $�b�vJ�Tuw
['�q&�@_d7
maNW��{�"1
采用一个放大因子为3的消色差扩束器。 c�K@�jmGj+
扩束器的设计是基于伽利略望远镜。 ��c�>HK9z{
因此,在光学表面序列(OIS)中结合了一个扩束和准直系统。 M6r��c!K��
与开普勒望远镜相比,在扩束系统中不会成实像。 3GH(wSv9�\
4. 说明:光学元件 D)Q)N�I��
+ H_WlY�g-
UG;Y^?Ppe5
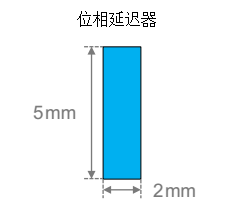
在参考光路中设置一个位相延迟平板。 $s\U�L}Gc�
位相延迟平板材料为N-BK7。 g5Z#xs�zj+
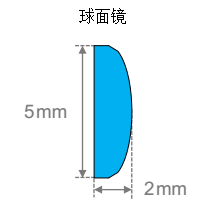
所研究的元件为球面镜,其曲率半径为100mm。
X[](Kj^`<
透镜材料为N-BK7。 WG��u%7e]�
其中心厚度与位相平板厚度相等。 kW@,$�_�cK
=J�S;;PzX[
+G�F#?X�0^
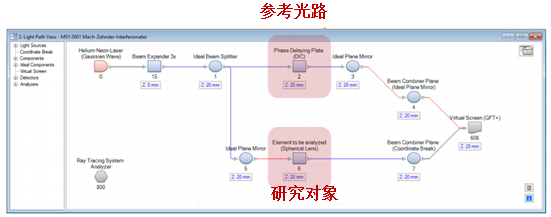
5. 马赫泽德干涉仪光路视图 71��fk.�16
e`K)_>^�n#
{Qv��>�q$Q
增加消色差系统和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 h3��*
x[W
由于VirtualLab的相对位置系统,必须设置Z轴方向的距离。 T�?Fco�hz(
"O[j!�fG8,
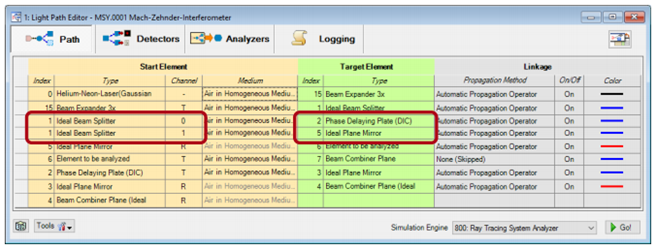
6. 分光器的设置 (u3s"�I�
d
CZ�<�~3bEF
�5O/i3m26�
S�6d`io�i-
为实现光束分束,采用理想光束分束器。 �w
��Y����
出于该目的,在光路编辑器中建立两次光束分束器。 d���XHB��#
随后的组件(如相位延迟板和理想的反射镜)连接到通道0和通道1,对应于两个光束分束器 laKuO��x}�
S=�`+�Ry�c
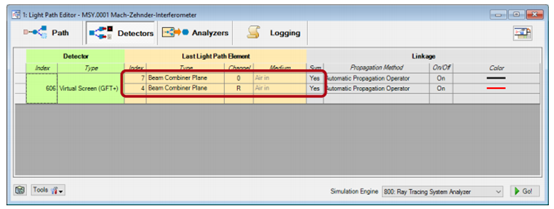
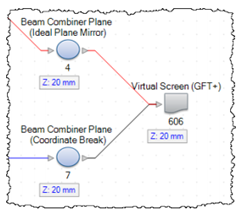
7. 合束器的设置 :���1ec�x$
A�3N]8�?�D
+|iY���g/2
)E�#2J$TD
两束光的直接通过虚拟屏幕探测器进行叠加(GFT +)。 :O<b�A&�:d
为此,必须选择两个输入通道的叠加,才能得到期望的干涉图。 hU]�H�TX'R
DQ#H,\�^<�
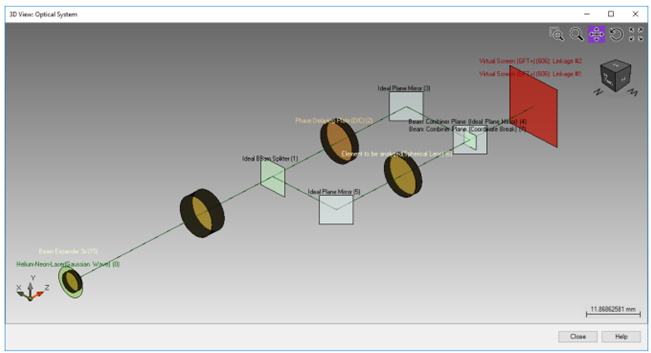
8. 马赫泽德干涉仪的3D视图 YevyN\,}V!
}A=y�=+4�j
I){�\0v�b@
增加扩束器和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 �{6�6sB{�P
应用示例详细内容 z4#(Ze@u~_
仿真&结果 ��g��>rp@M
�#1�1N�Po9
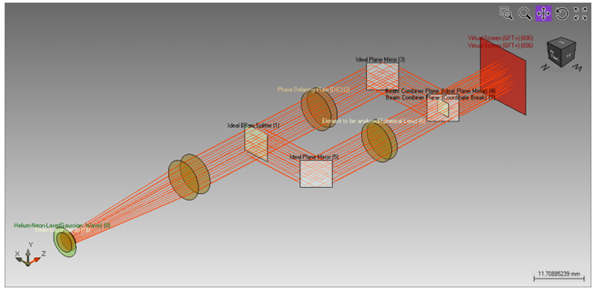
1. 结果:利用光线追迹分析 J��7D}���%
v�bx6I>�\Y
首先,利用光线追迹分析光在光学系统中的传播。 [D-�Q'"'�A
对于该分析,采用内嵌的光线追迹系统分析器。 ?3ig)J,e[�
aI(7nJ��=R
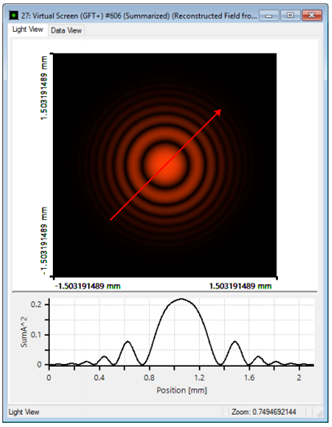
2. 结果:使用GFT+的干涉条纹 =<r�8fXW�Z
�~�\)�qi=
�:A
%^^�F%
现在,利用几何场追迹加引擎计算干涉图样。 R�O;Bl�:x4
由于采用高斯光束,图形边缘光强衰减迅速。 =*�qD4�qYA
因为干涉长度大,干涉条纹显示出较明显的极大值和极小值。 ��\Ng\B.IQ
�*L6��P�Le
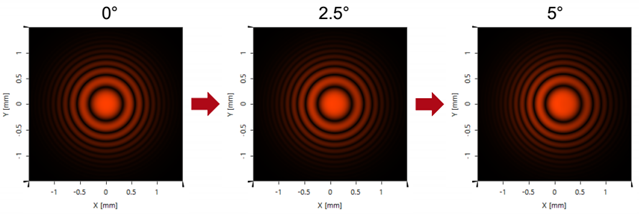
3. 对准误差的影响:元件倾斜 uwf
�5!Z:>
9SlNq05G�7
元件倾斜影响的研究,如球面透镜。 j*�"3t^|-�
因此,通过使用独立方向和参数运行,原件角度由0°变化至5°。 Aa0b�6?Jm�
结果可以以独立的文件或动画进行输出。 pL�a[�}�=
��/-bF$)vN
4. 对准误差的影响:元件平移 4�(}J.��-B
W?yd#j����
元件移动影响的研究,如球面透镜。 Y��2�B�&go
现在,通过使用独立位置和参数运行,组件X位置有0mm修正为0.5mm。 )V�L96�did
结果同样可以以独立的文件或动画进行输出。 dkgS�vi :!
 g4`Kp;�}&' g4`Kp;�}&'
5. 总结 ���~ ~uAc_
马赫泽德干涉仪的干涉图样的计算 �>�Vy>O�&r
NK|�?���y�
4. 仿真 ^����-��FX
以光线追迹对干涉仪的仿真。 �5D �M�"0
T=hh�o��Gn
5. 计算 C%*k.$#�r!
采用几何场追迹+引擎以计算干涉图样。 O#���wpbrJ
�O��}9KJU�
6. 研究 (b?{xf'��G
不同计算误差在干涉图上的影响,如倾斜和偏移 L
%�i�p��>
�8+]h�pa,q
利用VirtualLab软件可对马赫泽德干涉仪生成的干涉图案进行研究分。 �3l�V�^B[$
� +`7KSw�a
扩展阅读 yC�
7�7�c=
��@(��P=Eh
1. 扩展阅读 8WE{5�#�oi
以下文件给出了在VirtualLab中如何设置测量系统的更多细节。 ���zR!o�{8
?JL�7=o
X
开始视频 y/e���2�l�
- 光路图介绍 ^F?&|c�lM/
- 参数运行介绍 =@TQ>Qw%b
- 参数优化介绍 �GgaTn!mJt
其他测量系统示例: �D\<y)kh��
- 迈克尔逊干涉仪 | �mu+9���
|
|