| infotek | 2022-03-21 09:55 |
参数优化文档介绍VirtualLab Fusion的参数优化文档使用户能够为其光学装置应用非线性优化算法。该文档指导您完成优化配置并最终输出结果。这个用例解释了参数优化文档的不同选项和设置。目前包括三种局部优化算法和一种全局优化算法。  参数优化文档 可以为光学装置生成参数优化文档,该光学装置通过探测器或分析仪输出要优化的数字。 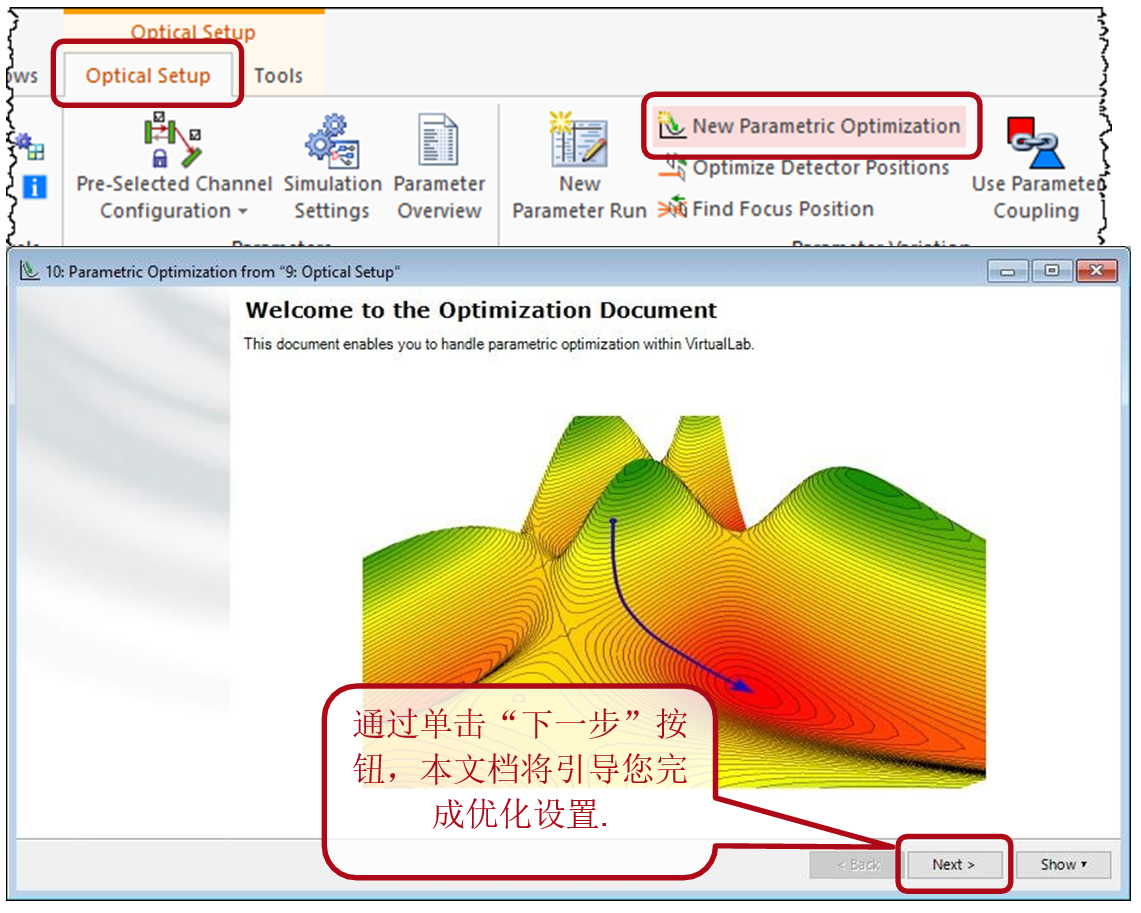 参数优化文档可以通过以下途径打开 •功能区项目光学装置>新参数优化 •快捷键“Ctrl+T” •光学装置编辑器的工具按钮 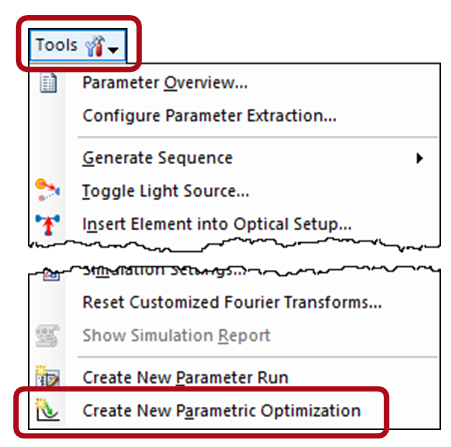 参数选择 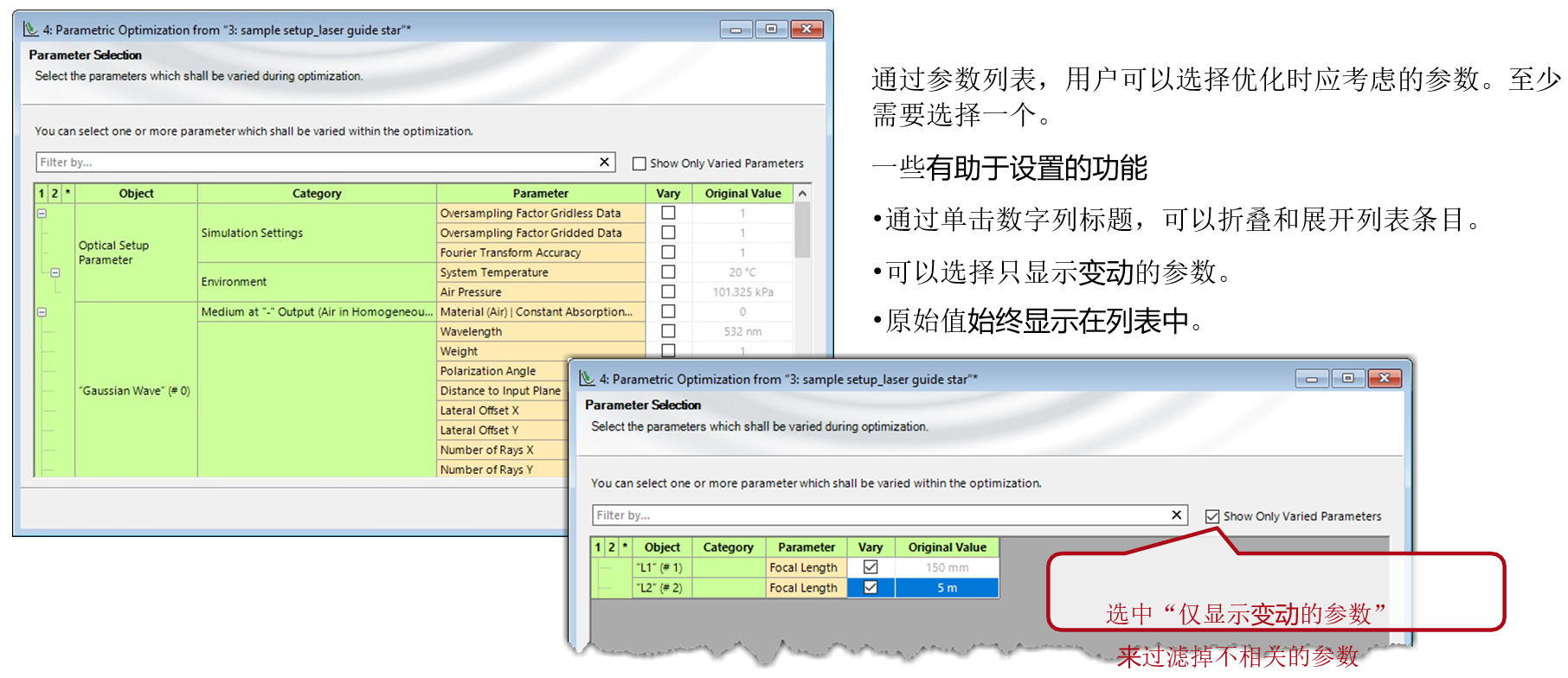 检测装置规范 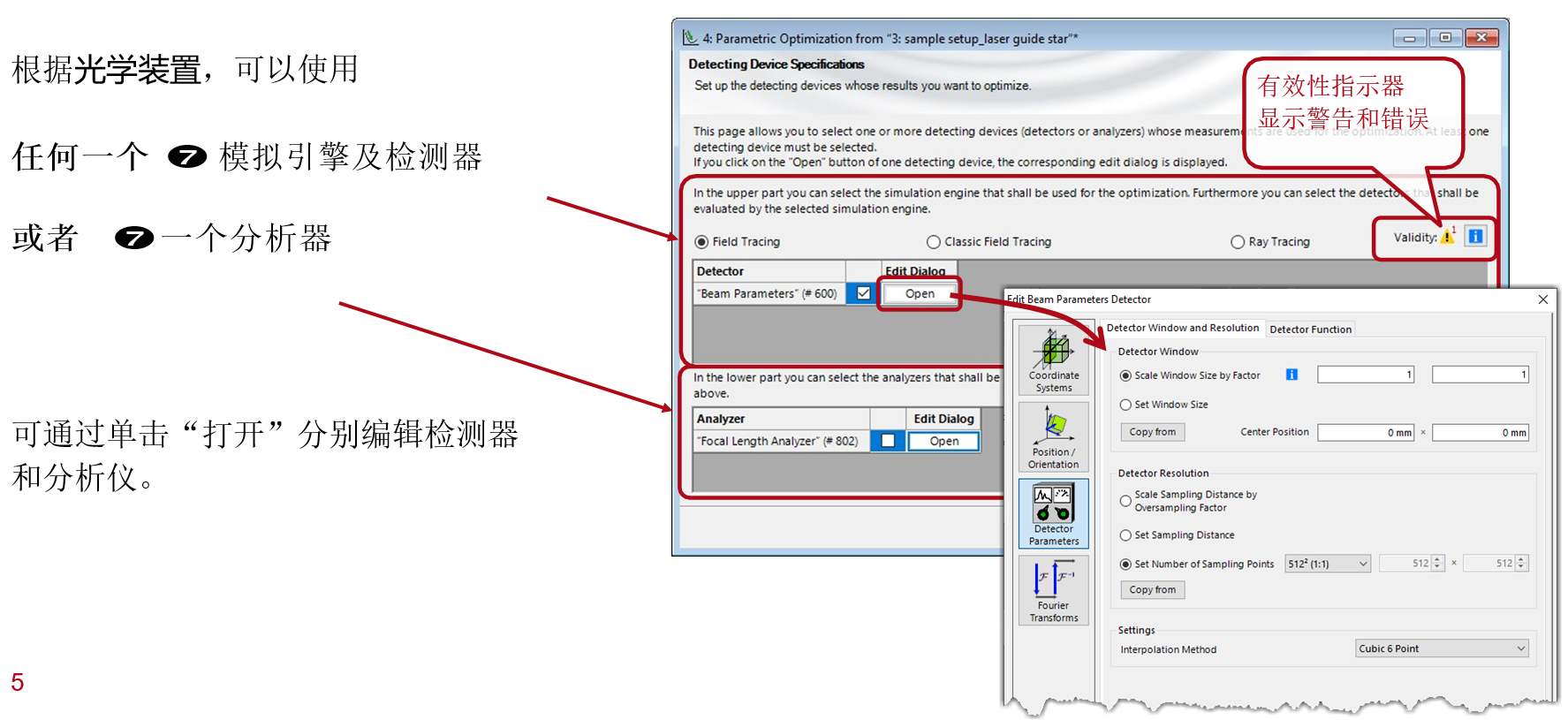 指定约束条件 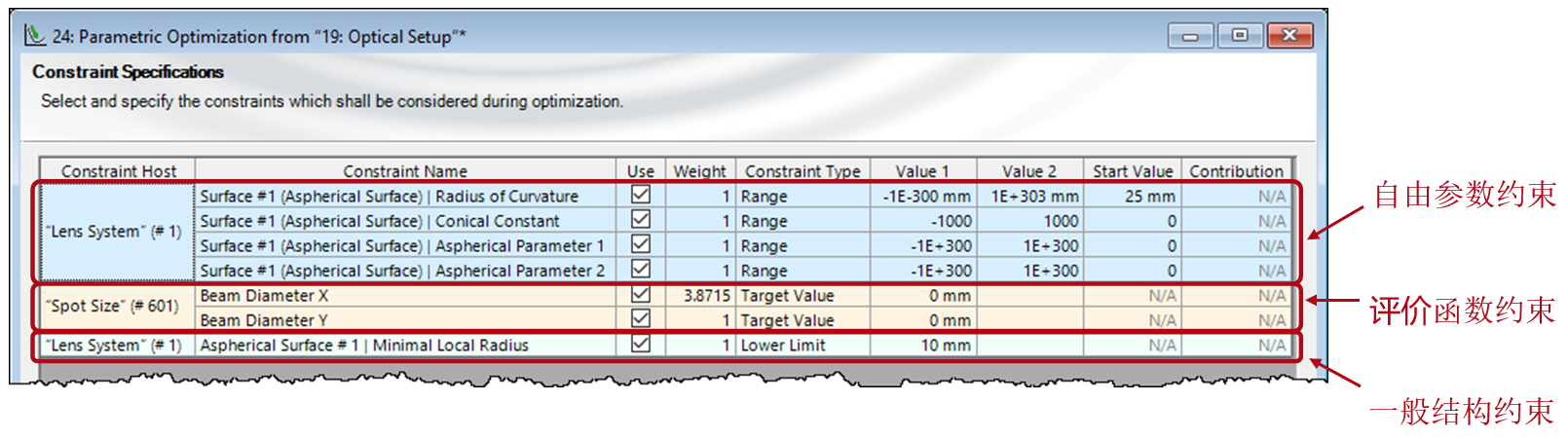 在此页面上,用户可以指定约束类型和关联值 • 系统选定的自由参数 • 探测器或分析仪计算的所有评价函数 • 可能的一般结构数量,取决于自由参数,不能直接修改。 指定约束条件 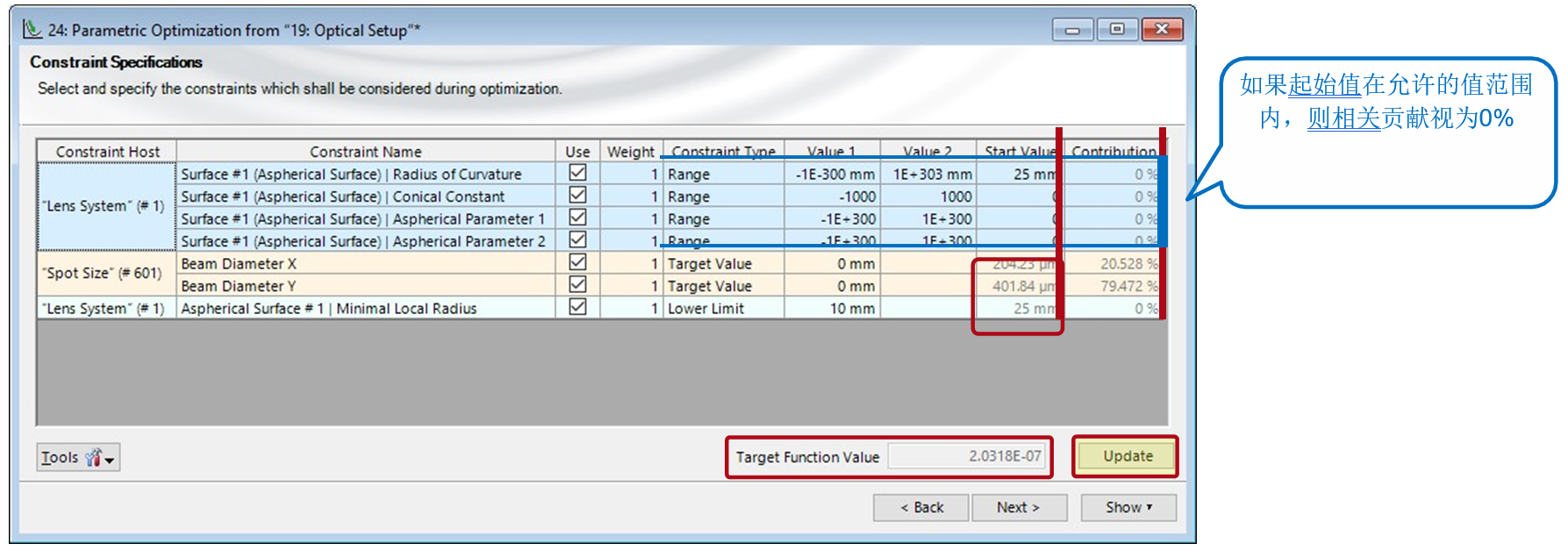 通过单击“更新”,将触发光学装置的自由参数的起始值的模拟。所产生的评价函数(即其起始值)以及 → 它们对优化的贡献(相关性或优先级) → 公共价值函数值=目标函数值,定义为所有约束的加权和。 权重与贡献 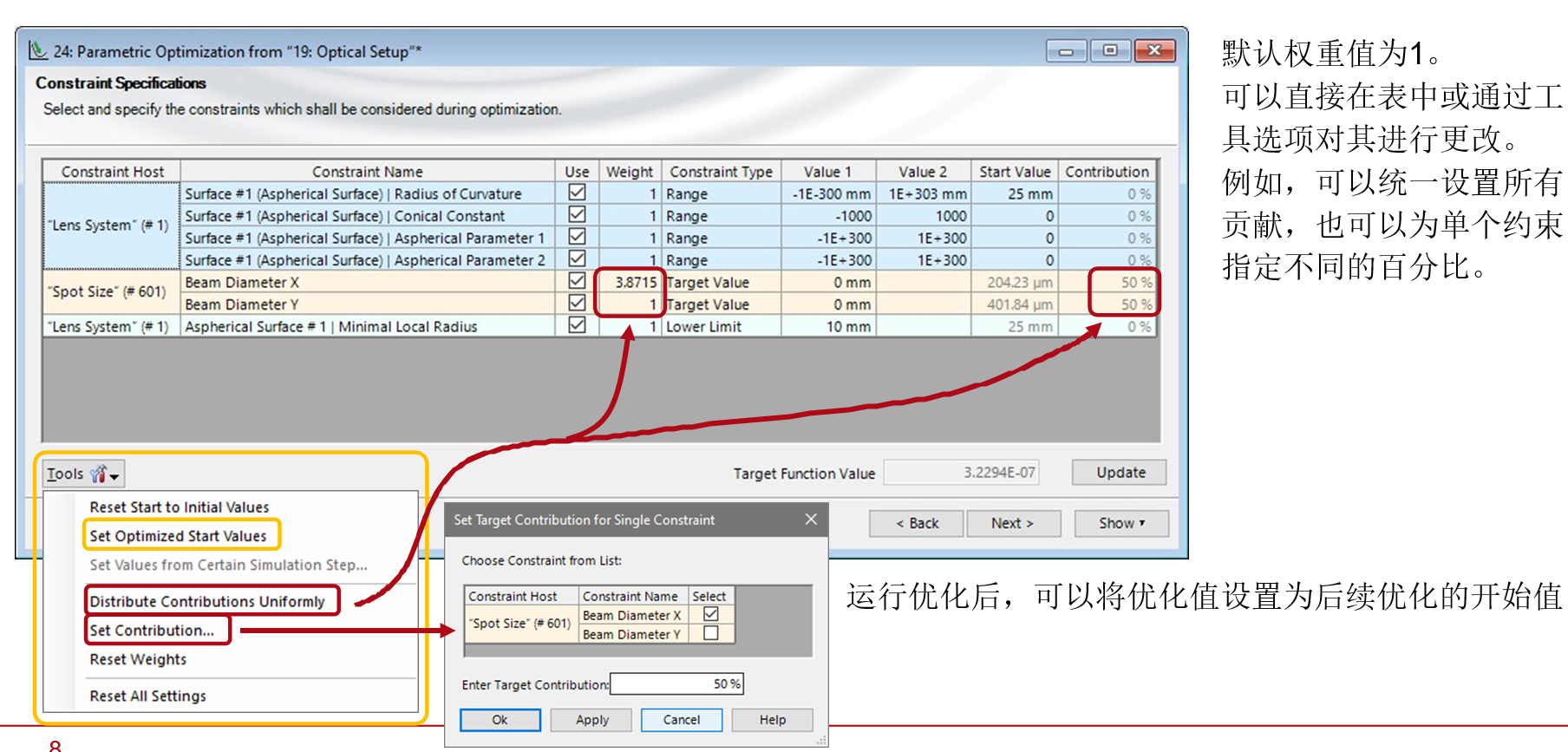 优化方法的选择 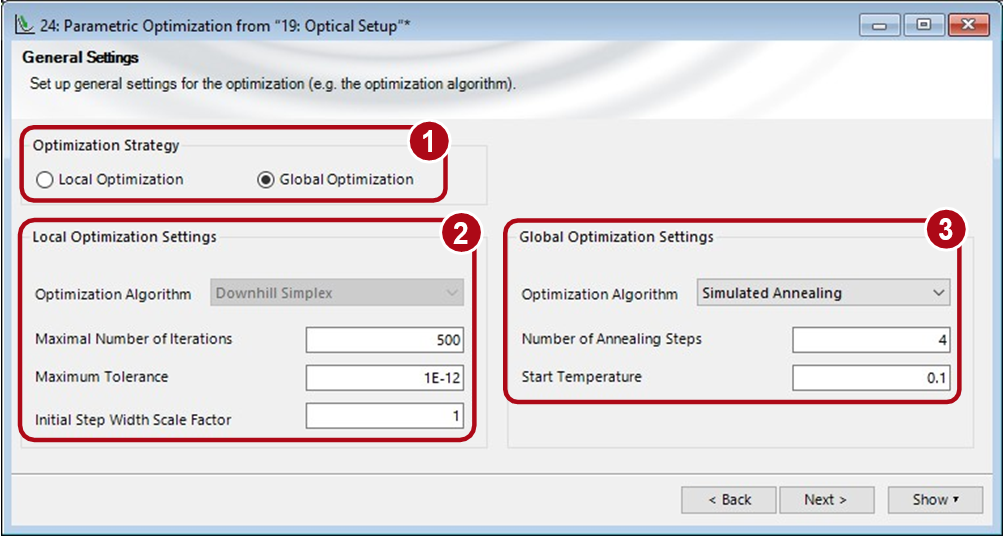 所有提供的优化都旨在使目标函数值最小化。 1. 选择优化策略(局部或全局) 2. 定义局部优化的设置 • 选择优化算法 • 当达到最大迭代次数*或与上一模拟步骤的偏差小于最大公差**时,算法停止。 • 通过初始步长比例因子,所有自由参数的起始值到第一次迭代值之间的步长均按比例缩放。即,控制初始配置周围的搜索区域; • eg.通过更高的值,可以跳出局部最小区域。 • 3.定义全局优化的设置 3. 定义全局优化的设置 *结果列表可能会列出更多的迭代;这源于这样一个事实,即一些优化算法也会显示中间函数结果。 **根据经验,可以设置一个最大公差值,该值比初始目标函数值小约4-5个数量级。 局部和全局优化 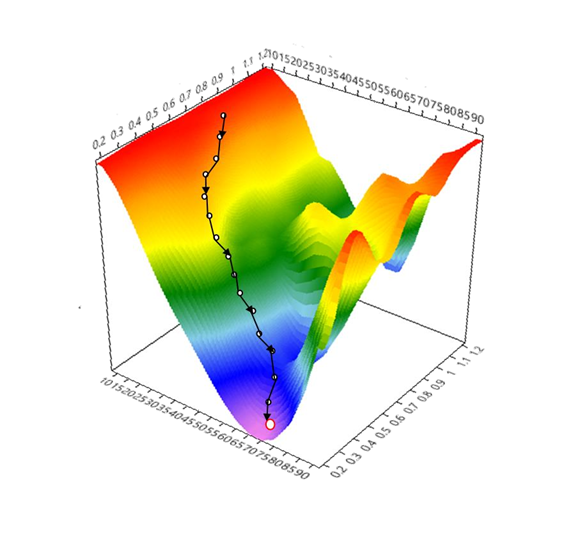 变量的目标函数图示(三维和二维) 局部优化算法速度很快,但它们在寻找全局最小值方面的成功通常很大程度上取决于起始值的选择。因此,在不知道良好起始值的情况下,全局优化更可取。  局部优化算法 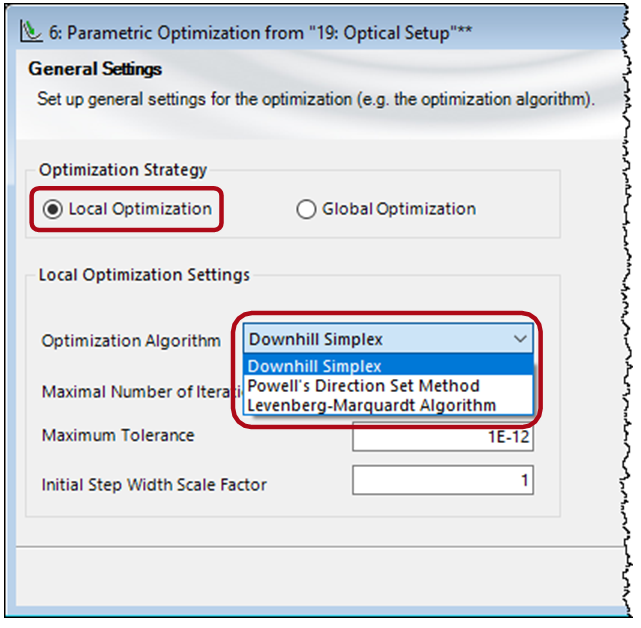 目前,提供了三种用于最小化多元函数的非线性局部算法: Nelder&Mead的下坡单纯形法,它的收敛速度不是很快,但它是一种简单而鲁棒的方法。通常适用于少于6个自由参数。 鲍威尔(方向集)法它可能更适合于大量的自由参数(>10). Levenberg-Marquardt算法它“在高斯-牛顿算法和梯度下降法之间进行插值。[…]在许多情况下,它可以找到一个解决方案,即使它从非常远的最终最小值开始。”收敛是可能的,但不能保证。 所有局部最小化算法都有陷入局部极小值的风险。为了尽量减少这种风险,可以尝试使用较大的初始步长比例因子,从不同的初始条件开始,或使用全局优化算法。 所有局部最小化算法都有陷入局部极小值的风险。为了尽量减少这种风险,可以尝试使用较大的初始步长比例因子,从不同的初始条件开始,或使用全局优化算法。 全局优化算法  VirtualLab Fusion为全局优化*提供模拟退火,通过添加随机温度项,实现对目标函数全局最小值的近似搜索**𝑡 设置为当前值,并使用  r是介于0和1之间的随机值, T是温度,该温度根据退火计划逐渐降低,具有可调节的开始温度和退火步骤数。 全局搜索的成功在很大程度上取决于选择的起始温度和退火次数。如果启动温度过低,算法可能会陷入局部最小值的环境中。另一方面,过高的温度值将增加“跳出”已检测到的全局最小值的周围的可能性。 *这种全局优化算法的名称及其参数类似于冶金退火,如果选择明智的冷却过程,退火过程将达到接近最优的低能状态。 **它通常会产生一个全局最小值的近似解,这通常是足够的,或者可以用于后续的局部搜索。 优化结果 在最终表格中显示了参数和相关结果。在此处或通过“参数化优化”功能区启动和停止优化。某些优化算法(如下坡单纯形)实际上不允许约束。取而代之的是惩罚规则。当前,源自超出约束设置的参数的所有结果单元格均为空。 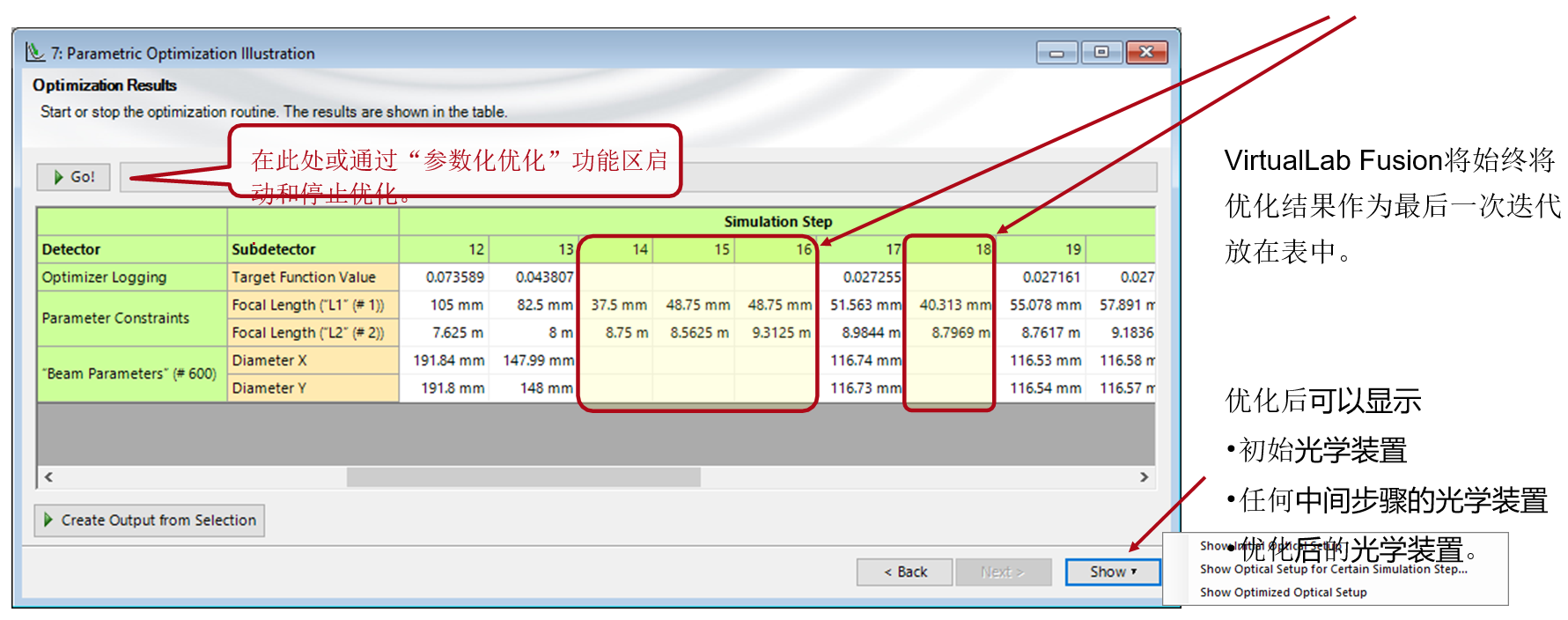 |
|