| infotek | 2022-03-09 09:01 |
光机热-基于卫星的太阳望远镜反射镜单元的设计1. 简介 这里呈现了ESA/NASA太阳轨道任务望远镜反射镜单元的设计历程。该任务致力于太阳和日光层,并被选为ESA宇宙视觉2015-2025计划的第一个中级任务。航天器将会携带各种科学装备。加载在它们其中的一种成像遥感仪器是偏振和日震成像仪(PHI)。PHI仪器将会在可见光的范围内提供光球矢量磁场和视线速度的高分辨率和全盘测量。LOS线速度地图将给出太阳内部详细的日震调查,特别是太阳对流区。通过靠近及从高纬度到35°的位置高分辨率研究太阳,PHI将会处理和解决太阳物理的基本问题。它由两个望远镜组成。离轴Ritchey-Chrétien(RC)高分辨率望远镜(HRT)将会在距离近日点150km处的分辨率下形成太阳圆盘的局部像。折射全盘望远镜(FDT)可以在轨道的各个阶段成像全部太阳圆面。每个望远镜在光路的前面都有自己的偏振调制包(PMP),来最小化偏振串扰效应。在103信噪比水平上的偏振测定是PHI的基线。HRT和FDT会依次将光送入到Fabry-Perot过滤器系统(约100mÅ光谱分辨率)和一个2048×2048像素的CMOS传感器上。太阳日光层的图像如图1所示。在右边中心可以看到一个太阳黑子。此外,日面上的米粒清晰可辨,它们具有几百到1000km的直径。 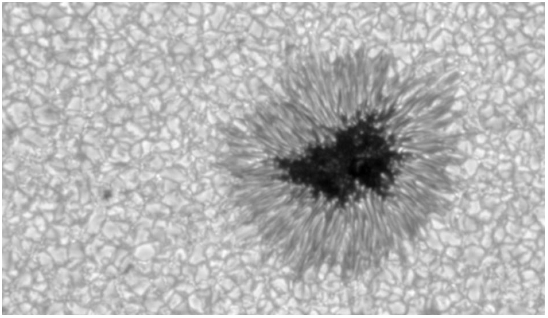 图1.太阳光球层的图像 下面的模型理论意在反射镜单元的设计。首先,如在FE分析中预测的一样,创建一个样机模型(QM)来检验反射镜的机械、热学和光学性质。这包括比如在休息和操作期间超出预期负载的振动测试,来证明设计的可靠性。这些测试成功完成后,两个飞行模型已经建好,可以预见,它们将会集成在飞行模型中又叫做PHI仪器飞行备用零件。 本文的结构如下。在接下来的部分中,呈现了望远镜的光学设计,为两个反射镜建立了波前预算,以确保在操作条件下所需的光学性能。第一个干涉测量显示了几乎完美的表面。反射镜的表面粗糙度和它对光学成像的影响在第三章讨论。随后是反射镜单元的光机设计的展示。这里呈现了有限元分析的一些结果,并与振动测量的结果作比较。一个简要的总结概括了这方面做出的贡献。 2.光学设计和性能 本文的重点是PHI-HRT的光学和光机的设计。光学设计的草图如图2所示。望远镜由一个主凹面和次凸面镜组成。系统的入瞳直径是140mm。主凹面是抛物线型,而次凸面是双曲型。望远镜的焦距是2475mm。仪器工作在617.3nm的Fe线上,谱宽是30nm。视场是尺寸为±0.14度的矩形。由于望远镜没有实际的中间焦点,进入到入射光瞳的辐射能量需要通过一系列渐晕光阑停止下来。要求的分辨率大约为1弧秒,引起最大的总波前误差为λ/25。这给光学和机械设计施加了极限的挑战。为了评估制造以及热学和结构效应对光学性能的影响,运行了一个容差分析,这会产生望远镜允许的偏心、轴向距离变化、倾斜和表面变形的限制。由于围绕太阳的预定椭圆轨道,望远镜需要完全工作在-30°C(远日点)到+90°C(近日点)的温度范围内。为了考虑所有的影响,两个反射镜单元的误差预算已经建立(见表1),误差预算使用波前损耗的各种贡献来评估,如温度变化、装配误差、重力释放和最重要的制造过程,比如光学表面从它的理想形状到抛光相关的偏差。显然,M1带有重力释放的总的预算略微超出规格(WFE<25nm)。然而,这里应该指出,一方面我们已经假定平面外重力(意味着水平安装)最坏的情况为16nm。重力释放更加现实的平面内情况提供了只有2nm。另一方面,我们假定一个相当保守的测量精度为10nm。把这个考虑进去,总的预算很容易下降到25nmWFE需求以下。 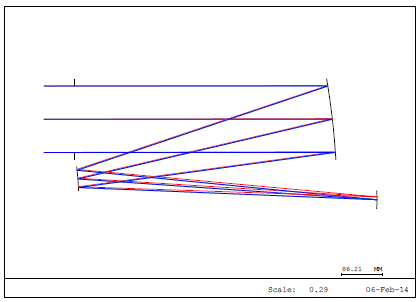 图2.HRT望远镜的光学设计 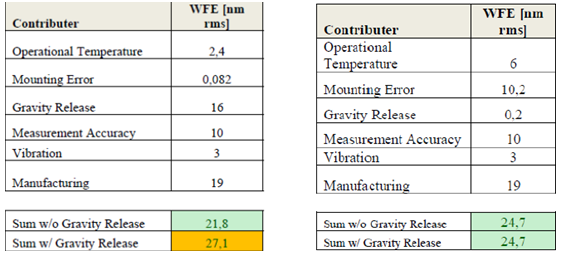 表1.波前误差预算:M1(左手边),M2(右手边) 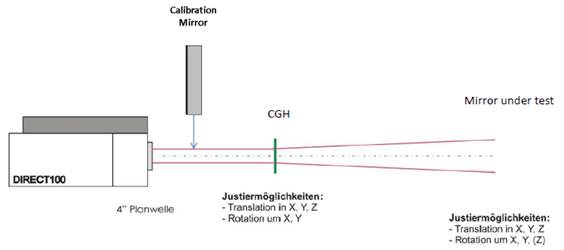 图3.M1基于CGH的NULL光学-干涉仪 此外,通过NULL光学-干涉仪光学方法可以测量反射镜表面,其中计算机生成的全息图(CGH)用于将波前调整为非球面表面形状。M1反射镜的基本实验装置如图3所示。对于M2,考虑其凸面表面,可以使用相似的装置。经过振动测试(见章节4.1),M1-QM反射镜的干涉图如图4所示。测得均方根(rms)波前误差(WFE)是23.9nm。在中心处相当尖锐的梯度位置是人字形-殷钢底座的固定点。它看来在振动测试期间发生了微小的环境效应。通过之前执行的正弦扫描和之后纵轴0dB随机振动测试之间的微小差异可以部分证实这一现象。 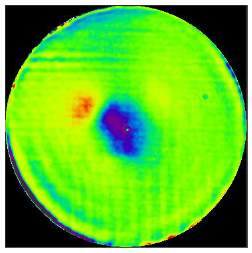 图4.M1-QM的干涉图 可通过在制造和装配过程进一步改善波前,如插入和反射镜锥体的共同研磨,反射镜的性能可以得到极大的提高。FM的干涉图描绘在图5(M1)和图6(M2)中。显然,可以分别实现优良的均方根波前误差值低至为17nm和19nm。因此,对于误差预算(制造+振动)所建立的要求可以用一个舒适的余量来满足。此外,在离子束成形(IBF)、热循环和振动后,由于QM观察的振动载荷导致的表面微小偏差,对于FM反射镜可以避免,对于与干涉图对立的M1反射镜,恰好如图7所示。波前误差只是轻微的下降,要观察的形状没有显著的变化。 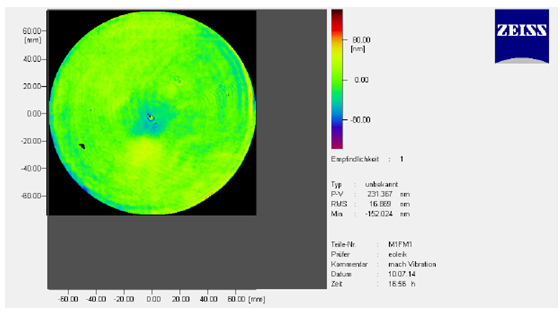 图5.振动后M1-FM反射镜的干涉图和泽尔尼克系数 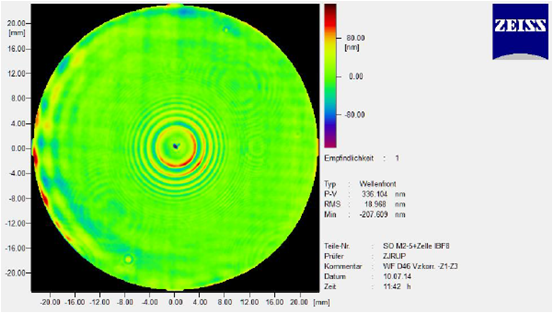 图6.振动后M2-FM反射镜的干涉图 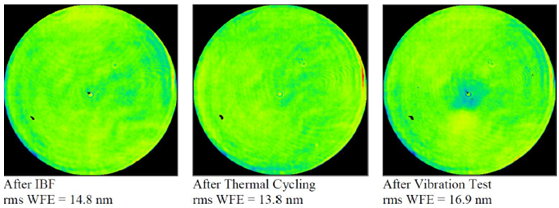 图7.M1-FM的干涉图(IBF、热循环和振动后) 然后,将测量数据(整数格式)导入到光学设计软件中,并且运行性能分析。用这种方法,可以证实如果调整合适,完成的望远镜能够满足Strehl > 0.8的要求。另外,“完成”的望远镜系统对高质量的反射镜的衍射MTF’s模拟如下所示(图8,左)。作为比较,也为一个在早期抛光不合格的次反射镜的系统模拟了MTF’s,该系统在靠近边缘处显示出严重的波前扰动(图8,右),宽带-均方根(MSF)大约为7nm(见章节3)。当高质量系统的MSF下降到大约1%时,退化的系统显示大约5%,这恰好证实了图9的估计。由于与真实的待观察对象(见图1)已经很低的对比,这是不可接受的。请注意,截止频率准确的计算为  。 。 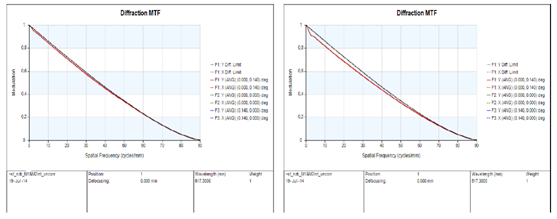 图8 集成高质量反射镜的望远镜模拟衍射MTF,高质量反射镜-左(图5和图6),和一个具有退化M2的望远镜-右 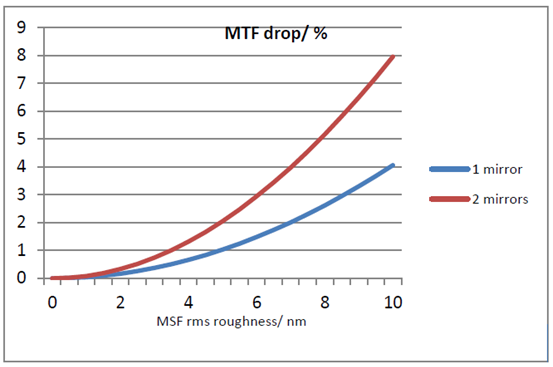 图 9: 由于MSF粗糙度,望远镜的两个反射镜的MTF下降预测 3. 表面粗糙度 对于反射光学系统来说,表面粗糙度尤为重要,因为它直接转化为杂散光光斑[1]。在PHI仪器的HRT部分中,杂散光有许多贡献者。使用功率谱密度(PSD)可以让表面粗糙度得到最好的讨论。球体的光学制造技术具有部分刀具几何形状,可以产生长尺度长度的表面抖动,称之为形状误差。同样,表面断裂力学可以导致短的空间尺度长度的抖动,称之为微粗糙和散射。因此,通常只有两个数字被指定:依据Nijboer Zernike多项式或形状偏差,和用均方根粗糙度给出的表面粗糙度。形状误差已经在先前的章节讨论过。表面(高频)粗糙度通常用显微干涉测量仪器(见下文)。 此外,HRT反射镜表面是高阶非球面的。使用现代钻石单转和抛光技术纳米级精度进行加工。最后的抛光步骤通常使用离子束成形技术完成。因此,它们容易引起残留的周期性表面起伏,通常被称为波纹或者中空间频率(MSF)误差。这些误差可能会导致相当大的对比度恶化,尤其是对于像太阳一样的扩展物体的观察,这些特性是特别有害的。因此,需要另一个标准来指定这些表面MSF’s对成像质量的影响。由于MSF粗糙度σ导致的对比度下降可以通过  来估计,其中σ是均方根粗糙度[2]。这种特性如图9所示。因此,对于反射镜表面,允许的0.5%的对比度下降会引入2…2.5nm的MSF粗糙度。另外,高空间频率粗糙度适用于微干涉仪范围,即对于0.4/nm到20/mm(2.5倍放大率)粗糙度小于1.5nm,5/mm到500/mm(40倍),粗糙度小于0.8nm。两个放大范围的实验数据已经收集,产生的PSD曲线如图10所示(蓝和红)。然后,在上面使用Harvey-Shack BSDF(双向散射分布函数)进行数据拟合[1,3],最后的参数为b0=80,S=-2.8以及L=0.001(绿色)。 来估计,其中σ是均方根粗糙度[2]。这种特性如图9所示。因此,对于反射镜表面,允许的0.5%的对比度下降会引入2…2.5nm的MSF粗糙度。另外,高空间频率粗糙度适用于微干涉仪范围,即对于0.4/nm到20/mm(2.5倍放大率)粗糙度小于1.5nm,5/mm到500/mm(40倍),粗糙度小于0.8nm。两个放大范围的实验数据已经收集,产生的PSD曲线如图10所示(蓝和红)。然后,在上面使用Harvey-Shack BSDF(双向散射分布函数)进行数据拟合[1,3],最后的参数为b0=80,S=-2.8以及L=0.001(绿色)。 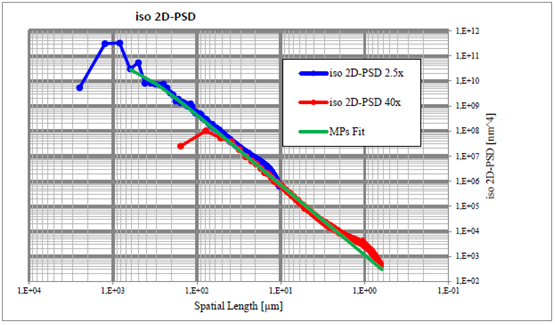 图10.测量和模拟PSD 接下来,使用Photon Engineering 公司的FRED模拟器[4]来运行光学系统的杂散光仿真。在这里,额外的假设需要包含在仿真中。举例来说,机械零件如配件或光阑需要模拟为黑朗伯散射体,这意味着入射光在所有方向散射均匀,具有大大降低5%到10%的反射率。FRED提供了一个预定义的元件用于这个目的,称为黑朗伯体(Black Lambertian)。此外,通过一个等价的表面粗糙度(颗粒效应转变为额外的均方根表面粗糙度)来模拟污染颗粒。根据ESA清洁度规格,微粒子污染洁净度水平CL350等价于500ppm,这需要反射镜表面满足此要求。同样,内场杂散光和外场杂散光都被模拟了。总之,仿真产生约0.1%的内视场杂散光、0.01%的外视场杂散光、由颗粒散射导致的0.16%和有划痕和坑导致的0.2%的杂散光。总计这些结果约为0.5%,满足了低于1%总散射的需求。抛光反射镜的微粗糙度通过微干涉仪检查。最后,用两种放大倍数2.5x和40x研究了4个不同的区域。与规格一致,两个反射镜都可以实现低于2nm的均方根值。M1的一个例子如图11所示。 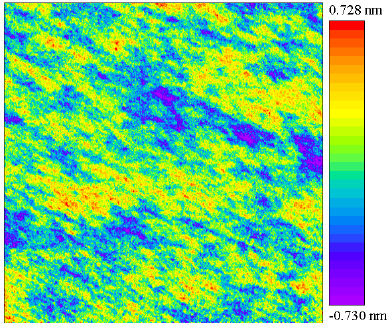 图11.M1的表面粗糙度图 4. 光机设计 在发射、巡航和在轨期间,太阳轨道的板载光学仪器必须承受极端的温度变化以及强烈的振动和冲击负荷。任务是计划在近日点接近太阳约0.28个天文单位。为了在这些严苛的条件下运行,仪器必须工作在温度范围-30℃到90℃,抵挡发射时1500g的冲击负荷。一个稳定的机械设计已经研制出来满足来这些需求,以上是为了在轨的极端条件下保证至高的光学性能。由于极端温度和强载荷的组合,两脚架夹紧优先于胶溶液来固定反射镜到结构。 4.1 M1反射镜单元 M1的底座(如图12所示)由一个三角形底座组成,它使用了一系列的弯曲来保证反射镜的固定点。这一设计的固定点是图12底部的孔。因为底座是由硬化殷钢和殷钢36制成,接触面是铝制的,在两个非固定的安装点会产生大幅度的位移。双金属板弯曲用于这些位置,以减少底座的应力。连接非固定安装点的横梁由底部的棒加固。这是用于将第一泵本征模式的“热区”移动到两脚架组件的中心。 反射镜通过三套两脚架连接到底座,用螺栓拴在底座上。使用殷钢针插设计,反射镜可以固定到两脚架上。为了提高反射镜连接的滑动阻力,反射镜和针之间的接口是圆锥形的,并且涂有一薄金层。这提高了使节点滑动所需的力。为了进一步提高节点滑动的阻力,过盈配合应用到了针与两脚架之间的连接。 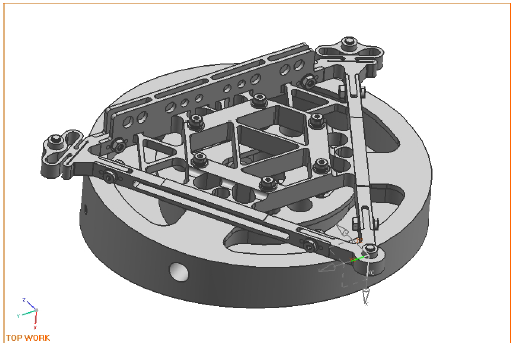 图12.M1反射镜单元的布局 为了满足总质量要求和优化M1单元性能,反射镜的质量需要减小。根据制造限制和光学性能要求,可以设计轻量化模型。4mm的最小壁厚度和5mm的最小表面厚度不变。使用了底切来提供反射镜额外的刚度。根据分析,预期的反射镜的最终质量减小到827g。轻量化设计从最远边和固定点移除了更多的质量,以便于使反射镜的重心尽可能的靠近几何中心。 为了最小化热力导致的表面变形,反射镜由高质量的微晶玻璃制成。而支撑结构是由高强度的殷钢合金组成。弯曲连接用于隔离反射镜单元和安装板。不加涂层的反射镜(与图15比较)部分显示了轻量化方式、下面的底座结构和两脚架。使用NX NASTRAN v6创建一个有限元(FE)模型,然后使用NASTRAN v. 7.1求解器分析它,最后在NX v6和FEMAP v10中进行后处理。通过FE分析,已经研究了单元的振动属性、机械稳定性和热性能。模型分析在0Hz到2000Hz的频率范围内进行,这覆盖了所有相关分析的本征频率。图13显示了模式1和模式2的形式,第一个本征频率在251Hz处。这在最小允许本征频率200Hz之上。第二本征频率(254Hz)对随机应力做出了最显著的贡献。在底座顶端的额外支撑结构,如图12所示,设计用于增加背向横梁的刚度,以及保持两脚架中心本征模的“热区”。 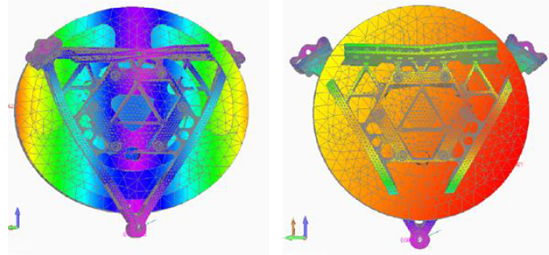 图13.M1反射镜单元共振模(FE分析) 在所有三个坐标轴随机、正弦和静态的载荷激励下,分析和测试了反射镜单元的振动。对于QM和FM1应用了不同的水平。在QM垂直方向上(平面外)随机振动的激励如图14(左)所示。载荷等于15.8的grms值。三个坐标轴模拟的响应曲线如图14(右)所示,其中x是垂直方向。在大约250Hz的峰值清晰可见,而最开始的2个模式之间相互重合且很难分辨。对于两个反射镜正弦静态载荷的案例已经进行了相似的仿真。另外,在操作温度范围和包括太阳辐射在内的极限温度处(-40°C和+100°C)),运行了一个热结构分析来估计光学表面的偏差。两个反射镜的最大波前误差总结在表1中。 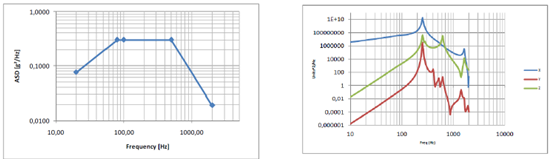 图14.M1在离轴激励下随机振动的激励(左手边)和PE预测响应曲线(右手边) 安全边界是一个临界判据,用于判断在操作过程中一些部分是否能够承受施加在上面的力。定义如下: 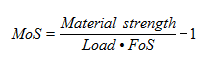 下面的安全因子(FoS)已经应用:微晶玻璃(2.5),金属部件(1.5极限和1.25输出)和固定元(1.4和1.15)。上面描述的所有模拟的载荷情况的最小MoS如表2所示。即使在极限的情况下,所有的元件表现出正的安全边界,这表明设计将会承受具有足够安全边界的载荷。此外,分析也表明,反射镜表面将满足整个温度范围内的光学要求。 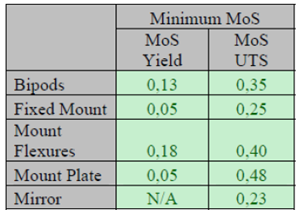 表2.M1所有模拟载荷情况的最小MoS 最终,FE分析结果需要通过实验振动测试的方法来验证。为此,在感兴趣的位置处反射镜单元需要装配一套加速传感器。M1 QM反射镜单元的一个例子如图15所示。然后,运行一个良好定义的测试程序,在所有三个轴上给反射镜施加特定的振动载荷,同时在良好定义点处测量加速度。 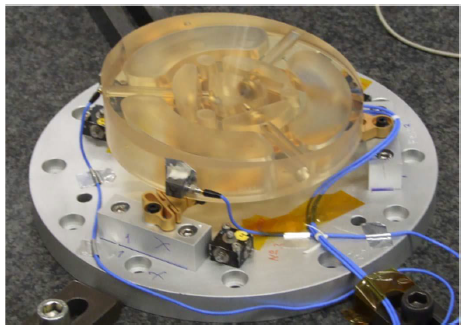 图15.为振动测试准备的M1-QM单元 总的来说,QM成功的通过了测试。两个实验结果显示在图16中,即在反射镜上任意激励的光谱(左)和振动的正弦扫频(右)。仔细观察可以发现,第一共振位于大约230Hz,接近分析结果(与图14比较)。在主峰的左边可以见到一个小的肩峰,这是初始的两个相邻的模式1和2,如FE分析中所报道的一样(见上文)。此外,比较在最大载荷应用之前和之后的正弦扫频,可以发现极好的一致性。因此,明确的证据表明没有机械变化(裂纹、塑性变形、滑动、松动或其他损伤)产生。 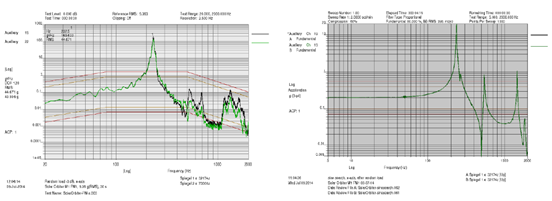 图16.随机振动(左)的测量光谱M1 QM及正弦扫频比较(右) 4.2 M2反射镜单元 M2单元(见图17)安装到一个钛环上(没有显示)。殷钢适配器用于两脚架和钛之间的缓冲。两脚架通过殷钢插脚固定到反射镜上。通过一组弹簧垫圈提供一个预载荷来保持连接,抵制滑动和裂缝。为了提高反射镜连接的滑动阻力,反射镜和插针之间的接口是圆锥形的。这会提高结点滑动所需的力。弹簧垫圈位于两脚架表面和反射镜垫片之间。根据指定,硬化殷钢和钛底座不应该形成紧的配合,因此,在它们之间设计了空间。然而,当环安装在一起时(见表1的M2错误预算),结果表明这个空间会对表面变形产生一定的影响。所以在制造过程中,决定减少空间,使环能够适应彼此。这会在变紧的过程中产生预载荷。M2单元作为一个斜置反射镜可以收集在飞行过程中产生的图像振动,鉴于此,互补钛环与一个压电驱动器相连。轻量也被用于M2反射镜(如图18所示)。没有接口板的质量是69g,满足了定义的最大质量为100g的要求。 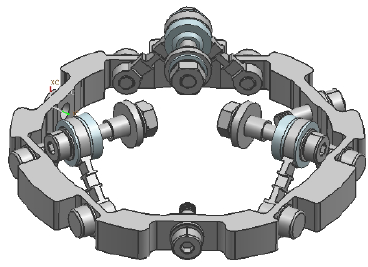 图17.M2反射镜单元底座的布局 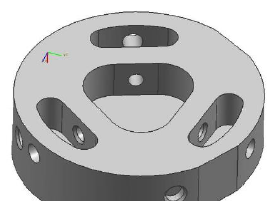 图18.轻量化的M2 在1730Hz和1735Hz预测的振动模式,满足了大于1.5kHz的要求。第一个振动模式显示在图19中。类似于M1,对M2单元已经进行了全面的FE分析。再一次,所有模拟情况(振动载荷、热结构)的最小MoS显示出正的安全边缘,这表明设计可以承受负载。此外,分析也表明在整个温度范围内和重力释放后,反射镜表面也满足光学需求。 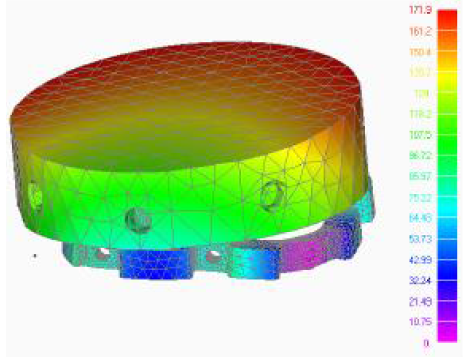 图19.M2的第一共振模 就像M1单元,M2单元也需要经历精密光学、环境和机械测试,来证明设计的适宜性和适当的制造和装配条件。仿真和测量的振动响应对应在图20中(比较预测的红色曲线和测量的绿色曲线),在1530Hz处发现了第一响应,这稍微的小于预测值,但是仍然符合规格。 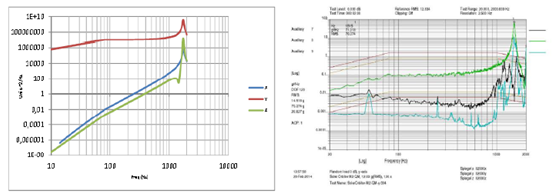 图20.M2单元(y轴)预测(左手边)和测量(右手边)的振动响应光谱 4.3.额外的实验测试 在振动测试没有显示出任何超出允许变形之前和之后,执行了所有关键部件的高精度坐标测量。此外,完成了在20 °C、40 °C和 60 °C的热测试,以了解在极限温度下单元的稳定性。可以表明在整个操作范围内,平移可在±20μm范围内。另外,执行了热循环测试(在整个存活范围内8个周期)。它表明光学表面可完全回复到最初的性能。总之,QM测试证明了其单元的可靠性,并证实了有限元分析的基本结论。 5.总结和结论 本文呈现了太阳轨道PHI-HRT仪器的反射镜设计的重要因素,概述了Ritchey-Cretien望远镜的光学设计,结果表明制造的高质量反射镜满足了预期的性能。此外,表面粗糙度要求在某些地方进行了详细的讨论。最后,已经勾勒出光机设计以及它的实现。最后,通过大量的实验测试表明,在太阳轨道的恶劣环境条件下,设计比较可靠,它能够为太阳物理研究提供高质量的图像。 |
|