| infotek |
2021-11-11 10:23 |
反射光束整形系统
光束传输系统(BDS.0005 v1.0) a$�w},=
`E
u�9T����zZ
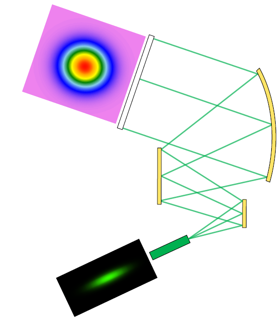
二极管激光光束使用无色散离轴反射装置进行准直和整形 �c u\ls��^
k4S�} �#!
E��o�KC8/�
q:vz�?G���
简述案例 :=rA Yc3]�
u�W��UR3n
系统详情 (7I�qY1W��
光源 Up�<��~��0
- 强象散VIS激光二极管 '�P�f_5�q�
元件 ?�QGm��oQ)
- 光束准直和整形的反射元件(例如圆柱抛物面镜) ,5/V�@;�i�
- 具有高斯振幅调制的光阑 y)6,0K �{k
探测器 >R(��8/#|E
- 光线可视化(3D显示) ,V�Ap>x+�O
- 波前差探测 Ej'
7h~�=v
- 场分布和相位计算 �Yx6hA#7I�
- 光束参数(M2值,发散角) }�<SNO)h�3
模拟/设计 �k]Zo-xh�4
- 光线追迹(Ray Tracing:):基本系统预览和波前差计算 �p�ss6Oz8
- 几何场追迹+和经典场追迹(Geometric Field Tracing Plus (GFT+) & Classic Field Tracing): �w|=gSC-o�
分析和优化整形光束质量 1 oj�hh�7<
元件方向的蒙特卡洛公差分析 �W�Elr�k:b
�{] O`g�G
系统说明 :v`o6x��8�
PfyRZ[3)c�
 vK(I3�db�! vK(I3�db�!
模拟和设计结果 �4Rh��R[�
tG/1p����W
  z/S,+��!|z z/S,+��!|z 场(强度)分布 优化后
.Y!��:x�=e
 �{1~9v�HAZ �{1~9v�HAZ
 �W}>=JoN^J �W}>=JoN^J
gC`)]*'t�E
总结 X:�Q$gO?[4
Rv�vh{U;�t
实现和分析高性能离轴和无色散反射光束整形装置。 Id�%_{),HX
1.模拟 �h2% J�/69
使用光线追迹验证反射光束整形装置。 M`�~!�u/D7
2.评估 e&2�w��dH&
应用几何场追迹+(GFT +)引擎来计算场分布和评价光束参数。 ymtd�>P"�
3.优化 g�v9=qu�G�
利用一个具有高斯形状孔径函数的光阑和经典场追迹引擎来优化M2参数。 4YLs^1'TG0
4.分析 MHo1 lrZa+
通过应用蒙特卡罗公差来分析方向偏差的影响。 l)Zs-V!M^\
W<NmsG})_g
对于复杂的光束整形装置,特别是离轴系统,可以使用VirtualLab来进行高效的模拟和分析。模拟过程中,根据情况应用不同的模拟引擎。 T�w//!rp�G
,-@5�N�Y1q
详述案例 A:e�G�5K}�
=MC~GXJSNw
系统参数 Q2eXK�[?*�
L�,�~MicgV
案例的内容和目标 �VFO�\4:.�
&!j�q!u�$(
在BDS.0001,BDS.0002,BDS.0003和BDS.0004案例中,研究了折射光束传输系统。 , H2Yp�Zk
Pd~Miy�O;K
 m"4B!S&Fc( m"4B!S&Fc(
之后,研究并优化整形光束的质量。 0+EN@Y^dAV
另外,探讨了镜像位置和倾斜偏差的影响。 `��U{mbw,
w(�B�H247`
模拟任务:反射光束整形设置 �/�s
c.C
引入的反射光束整形装置是基于一个反射镜系统,此系统由两个抛物面圆柱反射镜镜与抛物面截面反射镜组成。焦点距离和镜子的位置取决于输入光束的发散角。 ]���T�Sg!H
1zja�R4T�f
 .
uR M{Bs� .
uR M{Bs�
|y"jZT6R}t
 �WA.�AF�t �WA.�AF�t
Z^zbWFO�]5
规格:像散激光光束 �ni6r{eS�Q
=Ikg.jYq&F
由激光二极管发出的强像散高斯光束 ug��*D5�2?
忽略发射区域在x和y方向可能发生的移动 v�G
V����d
�=MLf[�� �
 >fzwFN��do >fzwFN��do
+�;q.�Y��?
 uLN[*���D uLN[*���D
6:�?�r�lh
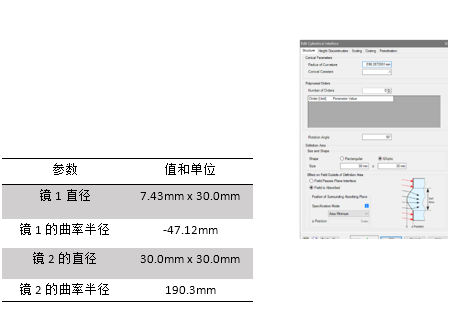
规格:柱形抛物面反射镜 ?� _�<[T��
`q�iQ$k��z
有抛物面曲率的圆柱镜 phP>��3f.T
应用用锥形常数.-1来实现锥形界面 KWhZ� +i`�
曲率半径等于焦距的两倍 �Ht[{ryTxu
7>i2OBkAhB
W�
�f@t4(i
规格:离轴抛物面圆柱镜(楔型) �RY=���1H�
1f4�b�t�6[
对称抛物面镜区域用于光束的准直 �s_eOc��m
从VirtualLab元件目录使用离轴抛物面镜(楔型) �zgKY4R�{V
离轴角决定了截切区域 D�QJG�,?e{
V U~Dk);Bv
规格:参数概述(12° x 46°光束) xx8U$�,N�g
sR=�/%pV�N
  #S5`P�d!�I #S5`P�d!�I
A^�Cj�1:,�
光束整形装置的光路图 l@~L�V}�BI
��UUtbD&�\
 or_+2a�G�� or_+2a�G��
因为离轴抛物面镜的位置是相对于它的焦点,那么到反射镜2的距离z必须是负的。 i�$U�Qb�d�
U�A�Yd?�r�
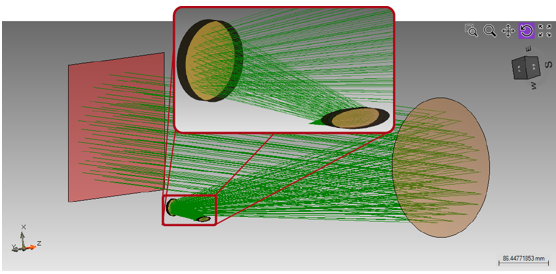
反射光束整形系统的3D视图 )�\��0�F7Z
5/I_�w��0�
 8_we:�
9A 8_we:�
9A
�KMjg;!��y
光学元件的定位可以通过使用3D系统视图来显示。 dp�zw.�Z��
绿线表示生成的光轴,由VirtualLab的基础定位方法生成(仅仅设置了距离z和倾角)。 G��'#41>q+
3/go��Cg��
详述案例 ~OFvu�}]��
LSd*|�3E}n
模拟和结果 g+�[kde;(^
py<_Hy�J��
结果:3D系统光线扫描分析 H�[�W���eu
首先,应用光线追迹研究光通过光学系统。 F0dI/��+��
使用光线追迹系统分析仪进行分析。 GJ�Qc�!cqk
2x}����6\t
file used: BDS.0005_Reflective_BeamShaper_01_RT.lpd \t.}-u<7{
w|��Aq�q�e
使用参数耦合来设置系统 D�`o<,�Y�
%�XR�N]tsu
�m(�4�7��s
自由参数: �x�J(:m<�z
反射镜1后y方向的光束半径 �yTAvF\s$(
反射镜2后的光束半径 �N{j�oXHCu
视场角,这决定了离轴取向(这些值保存为全局变量) e��a��ZQ2�
由于功能原理,所有系统参数(距离,焦距,直径)可以由光束参数分析计算。 d@kc[WL�D^
对于此计算,应用了嵌入的参数耦合功能。 ,4@|1z{bfm
��hR)2�xz
 6rDfQ`f\p
6rDfQ`f\p
�Dy9\O77�>
��H��F��tf
 �3<(q�� �} �3<(q�� �}
�jNl/!l7B�
自由参数: tI�Z~^*'��
反射镜1后y方向的光束半径 k�U*{4G|6�
反射镜2后的光束半径 ^U�d��v]Wh
视场角,这决定了离轴取向(这些值保存为全局变量) �e>H�:/�24
基于光束发散角和直径(x和y方向)焦点,可以计算并设置反射镜的直径和距离z。 #Mg��vG�, #Mg��vG�,
|
|