| infotek | 2021-10-21 09:16 |
高数值孔径准直系统的光线追迹分析关键词:光线追迹,波前差,自定义评价函数,准直,RMS 1. 描述 ■ 该案例中介绍了如何利用VirtualLab软件中光线追迹引擎评价一个高数值孔径准直透镜系统的性能。 ■ 显示光线追迹分析结果的二维和三维结果。 ■ 此外,利用一个可编程探测器对光线追迹结果中的自定义评价函数进行评价: — 每条光线的波前差 — 准直光束波前差的均方根(RMS)值 2. 系统 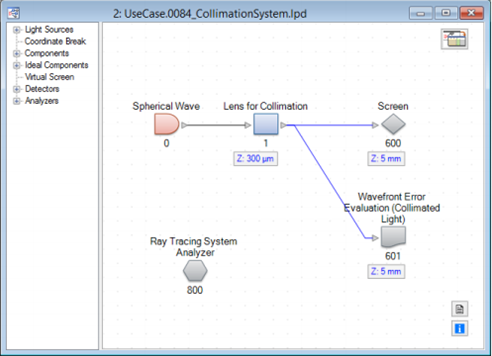 文件名:UseCase.0084_CollimationSystem.lpd 3. 系统配置 ■ 该系统包括一个用于照明准直透镜系统的球面波。 ■ 透镜系统通过光学界面序列(OIS)定义。 ■ 在透镜系统后面5mm处放置一个虚拟屏和一个可编程探测器。 ■ 可编程探测器可以定义光线和场追迹的自定义评价函数。 ■ 在这个案例中,利用光线追迹信息(光程)计算波前差。 ■目前这个探测器仅可用于准直光束。其功能将会很快的得到增强。 4. 编辑可编程探测器 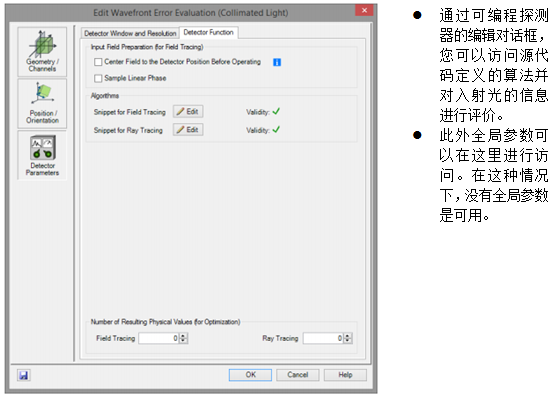 5. 光线追迹系统分析器结果(3D) 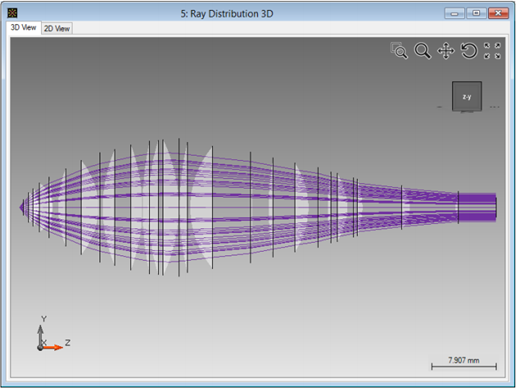 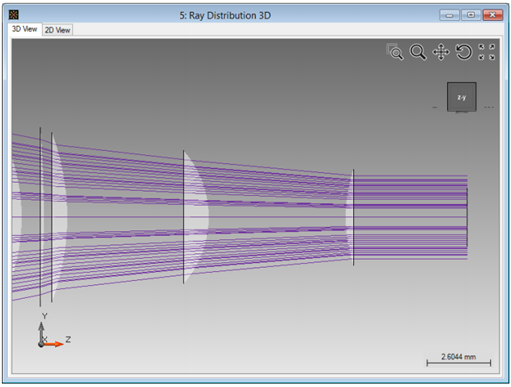 6. 光线追迹结果(虚拟屏) 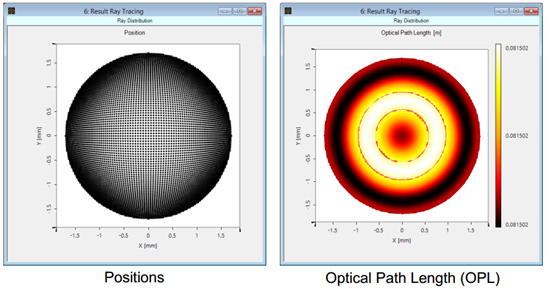 7. 光线追迹结果(波前差探测器) 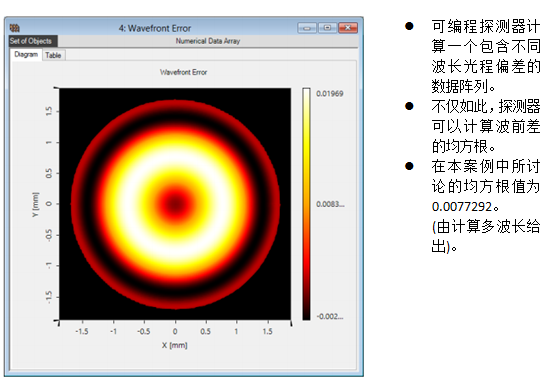 8. 总结 ■ 该案例说明,VirtualLab软件可用于分析复杂光学系统。 ■ 利用光线追迹可以进行三维和二维评价。 ■ 可编程探测器允许用户定义自定义的评价函数。这可以快速生成一个缺失的探测器防方程(非内置)。 ■ 波前差和均方根探测将会在将来的版本中改进并作为标准探测器引入(内置)。  |
|