| infotek | 2021-08-02 10:24 |
基于SLM光束整形系统中光学系统像差的研究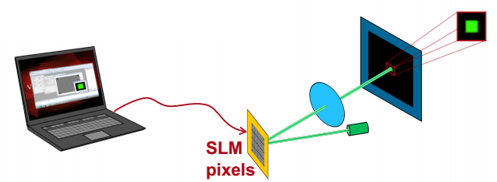 1. 系统细节 光源 — 高斯激光束 组件 — 反射型空间光调制器组件及后续的2f系统 — 不同的傅里叶透镜设计(球面,非球面) 具有不同的性能和像差 探测器 — 视觉感知的仿真 — 高帽,转换效率,信噪比 建模/设计 — 场追迹: 基于不同性能傅里叶透镜的SLM光束整形系统的性能评估。 2. 系统说明  3. 建模&设计结果 不同真实傅里叶透镜的结果:  4. 总结 基于采用傅里叶光学的SLM光束整形系统的性能研究。 理想光学系统采用2f系统代替具有透镜像差的真实透镜。 分析由不同球面和非球面的性对高帽光束质量的影响。 光束整形应用需要高性能和低像差的光学系统,如非球面系统。 应用示例详细内容 系统参数 1. 该应用实例的内容 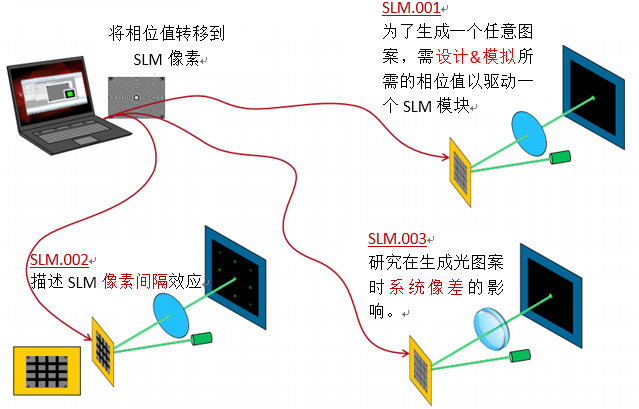 2. 仿真任务 在之前的案例中,采用了理想的傅里叶光学系统(2f系统)。在接下来的工作中,使用真实的透镜进行替换,该透镜存在多种光学像差。 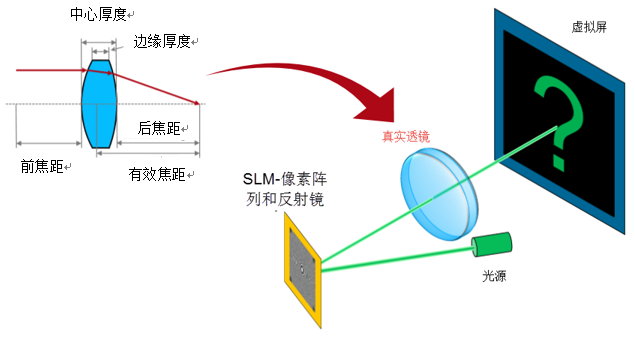  4. 参数:SLM透射函数  5. 由理想系统到实际系统 用真实的傅里叶透镜代替理想2f系统。 因此会产生像差,像差由所用系统的性能决定。 对于真实透镜系统的描述,需要必要的耦合参数。 实际系统可这样选择:有效焦距有2f系统相近。 表格中的参数与之前采用的2f系统理想指标一致。   应用示例详细内容 仿真&结果 1. VirtualLab中SLM的仿真 由于可以嵌入组件,VirtualLab可以轻松的实现反射系统(如反射镜,真实透镜等)。 以一个真实的系统(双凸球面透镜)作为傅里叶透镜。 为优化计算加入一个旋转平面 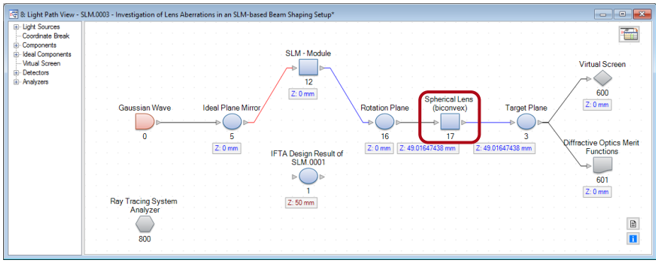 2. 参数:双凸球面透镜 首先,使用一个具有相同曲率半径的双凸球面透镜。 由于对称形状,前后焦距一致。 参数是对应波长532nm。 透镜材料N-BK7。 有效焦距可通过VirtualLab中的透镜计算器进行计算。   3. 结果:双凸球面透镜 生成的礼帽光束是一个干涉图案的叠加,干涉图案的出现时由于像差造成的。 较低的转换效率(56.8%)和信噪比。 一个对称双凸系统不能提供合适的传输性能。   4. 参数:优化球面透镜 然后,使用一个优化后的球面透镜。 通过优化曲率半径获得最小波像差。 优化获得不同曲率半径,因此是一个非对称系统形状。 透镜材料同样为N-BK7。 关于使用VirtualLab进行透镜优化的更多信息参考示例BDS.0003  5. 结果:优化的球面透镜 由于球面像差,再次生成一个干涉图样。 转换效率(68.6%)和信噪比一般。 一个优化的球面系统同样不能提供合适的传输性能。   6. 参数:非球面透镜 第三,从Asphericon中选择一个非球面透镜(类型:A25-50LPX)整合到SLM系统。 非球面透镜材料同样为N-BK7。 该透镜从VirtualLab的透镜库中导入。 关于使用VirtualLab进行透镜优化的更多信息参考示例BDS.0003  7. 结果:非球面透镜 生成期望的高帽光束形状。 不仅如此,转换效率(90.8%)和信噪比都非常好。 非球面透镜以几乎零像差将SLM函数转换成高帽光束。   8. 总结 基于采用傅里叶光学的SLM光束整形系统的性能研究。 理想光学系统采用2f系统代替具有透镜像差的真实透镜。 分析由不同球面和非球面的性对高帽光束质量的影响。 光束整形应用需要高性能和低像差的光学系统,如非球面系统。 扩展阅读 扩展阅读 开始视频 - 光路图介绍 该应用示例相关文件: - SLM.0001:用于生成高帽光束的SLM位相调制器设计 - SLM.0002:空间光调制器位像素处光衍射的仿真 QQ:2987619807 |
|