| infotek | 2021-07-14 10:15 |
一个离轴抛物面反射镜的几何场追迹关键词:聚焦,几何场追迹,衍射场追迹 1. 描述 ■ 该案例中介绍了几何场追迹+引擎的使用并示范了如何获取一个探测器面上的传输场的电磁场信息。 ■ 几何场追迹引擎可用于计算焦点前的场分布。 ■ 几何场追迹引擎的计算结果被转换成一个谐波场。 ■ 谐波场通过衍射传播(严格的SPW算子)到焦点。 2. 系统 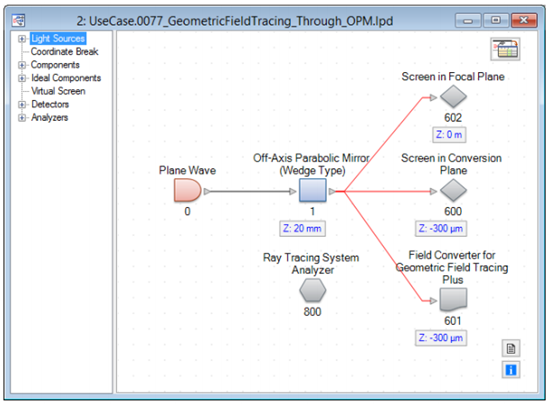 文件名:UseCase.0077_GeometricFieldTracing_Through_OPM.lpd 3. 系统配置 ■ 系统包含一个平面波光源,光源直径12mm x 12mm。 ■ 光源为单一波长为532nm的单色光源。 ■ 离轴反射镜置于光源后20mm处 ■ 反射镜可将光线偏折90°,焦距20mm,直径20mm x 20mm。 ■ 在反射镜编辑对话框中,可以通过一个定位的球面参考点(焦点)选择反射通道。 4. 反射镜的几何结构/反射通道 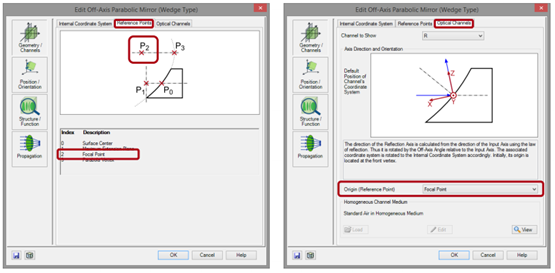 ■ 在该光学系统中,我们采用3个探测器 — 虚拟屏(在焦平面位置) — 虚拟屏(置于焦平面前300um->转换平面) — 为几何场追迹+引擎采用的场转换器(置于焦平面前300um->转换平面) ■ 转换器是用户体验计划的一部分,现在还不能作为集成组件使用。 ■ 在不久的将来,几何场和衍射场追迹技术的组合使用将会得以实现。这也是用户体验的一部分。 5. 转换器的编辑选项  ■ 场转换器对话框如左图所示。 ■ 用户可以输入: — 场尺寸 — 采样距离 ■ 转换器中可以使用这些参数。 ■ 这些函数很快也可以进行自动化应用。 6. 光线追迹系统分析器仿真结果 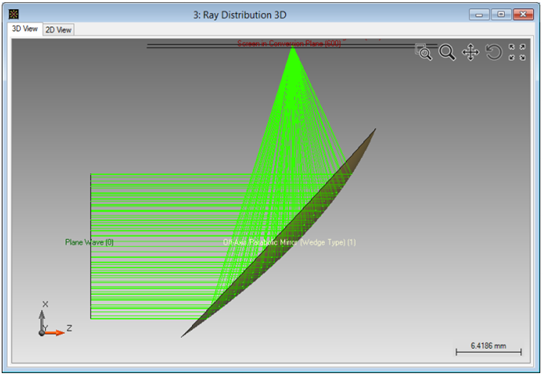 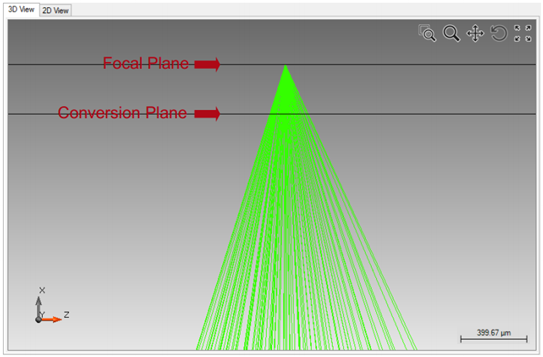 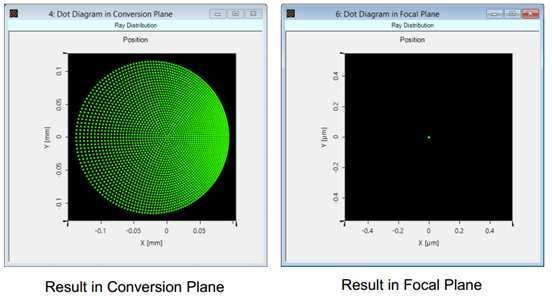 8. 几何场追迹+结果 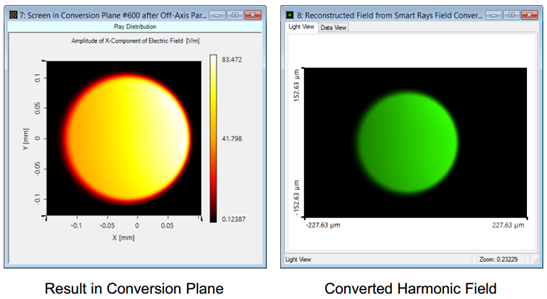 9. 焦平面上的传播 ■ 通过衍射传播算子,转换的场信息可以传播到焦平面。 ■ 在传播功能区,可以选择传播算子。 ■ 在该案例中,我们选择自动传播算子。 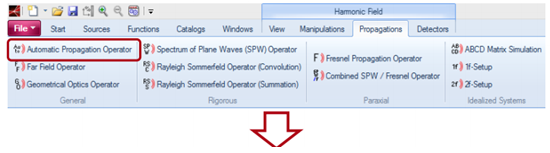 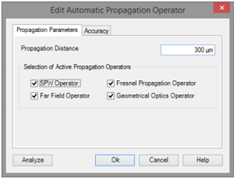 ■ 输入衍射传播距离300um(转换器与焦平面间的距离) ■ 自动传播算子选择严格的平面波频谱算子。 11. 焦平面上的结果   ■ VirtualLab Fusion软件中,用户可以使用几何场追迹引擎。 ■ 利用几何场追迹引擎,用户可以对系统中的电磁场信息进行研究并能够与智能光线一样快速的传递信息。 ■ 将光场转换成谐波场(集)允许使用衍射传输技术进行进一步的传输。 ■ 可以对离轴抛物面反射镜焦点处的场分布进行评价。 ■ 目前几何和衍射场追迹技术的联合只能通过手动完成。在今后会得到优化和改善。 QQ:2987619807 |
|