| infotek | 2020-12-18 09:45 |
利用光线追迹引擎进行参数优化关键词:光线追迹,镜头,优化,曲率半径,设计 1.描述 ▷ 在该示例中,我们介绍了如何利用VirtualLab软件中的光线追迹引进行参数优化。 ▷ 在此示例中,对一个球面透镜进行优化,使其在透镜后指定的距离上生成聚焦光斑。 ▷ 球面镜的光学界面的曲率半径被设计为自由变量。 2.系统光路图及系统配置 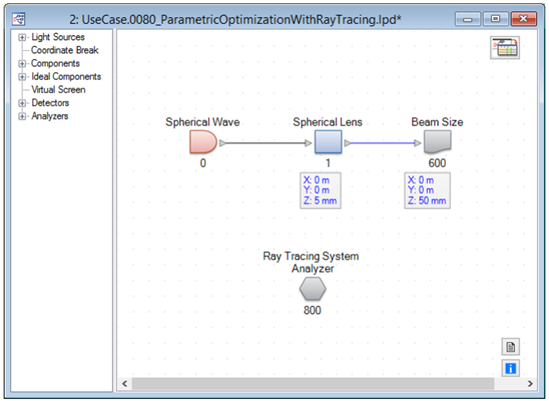 ▷ 该光学系统由球面波照射一个球面透镜组成。 ▷ 通过设计,使透镜的焦点位于透镜后50mm的位置。 ▷ 在目标平面处,利用光束尺寸探测器计算光斑的大小。 ▷ 光束尺寸探测器提供了几个选项,包括利用光线追迹引擎评估光斑的大小。 ▷ 用户可以选择测量方法(RMS或峰值)进行计算,也可以附加参数。  光束尺寸探测器参数窗口 3.初始系统的光线追迹结果(3D) 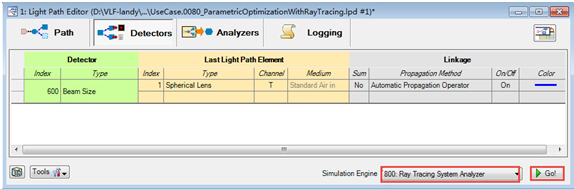 选择光线追迹系统分析器,点击Go! 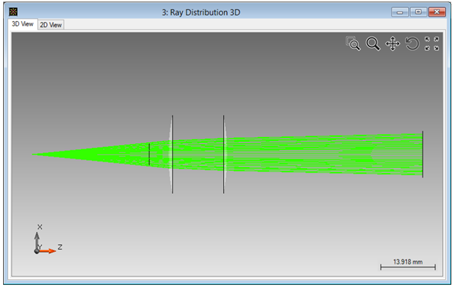 初始系统光线追迹结果 4.参数优化的生成 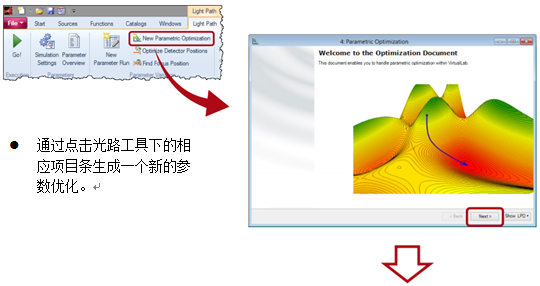 5.设置参数优化 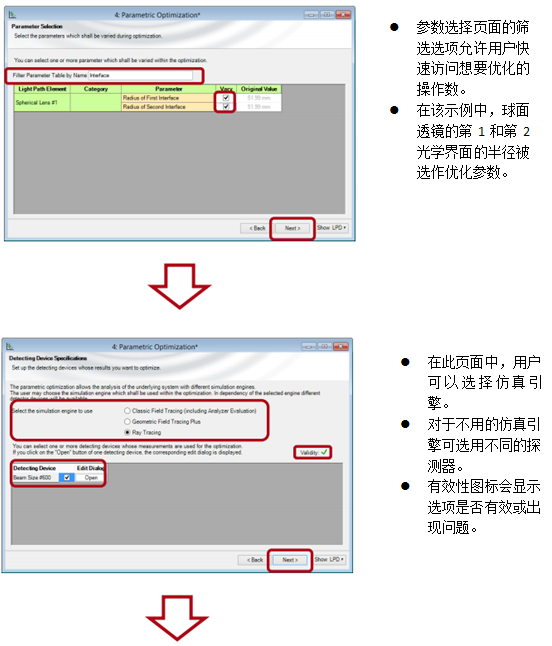 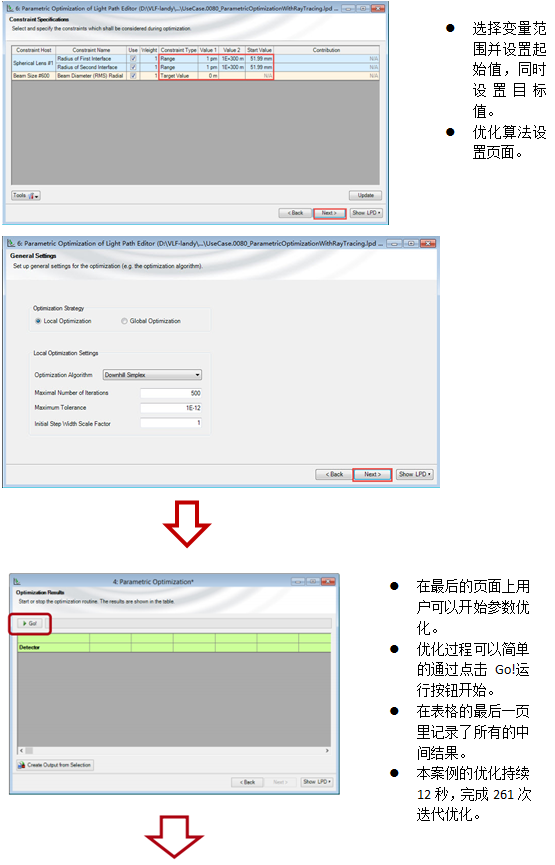 6.参数优化结果 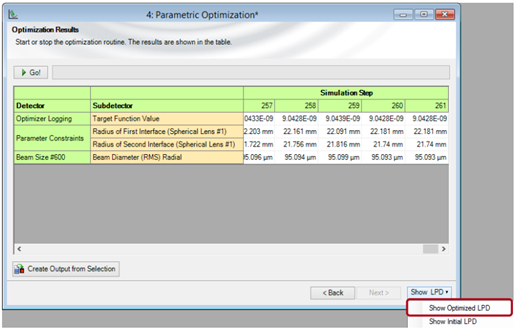 优化结果页面,选择“显示优化后的光路图”(”Show Optimized LPD”)可以获得优化后的光路图 7.优化后系统的透镜参数 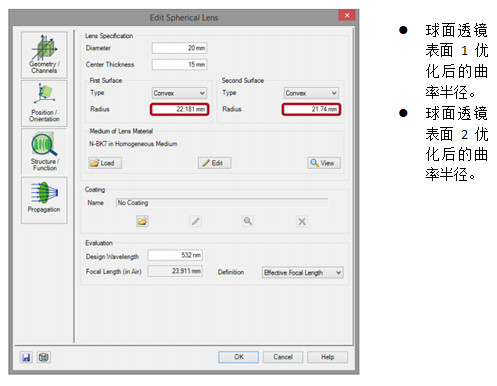 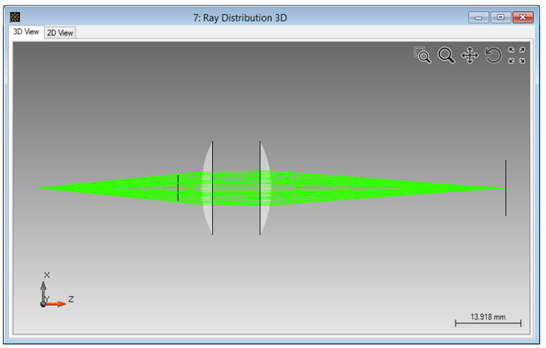 通过使用光线追迹系统器(Ray Tracing System Analyzer)获得光线追迹三维结果 9.总结 ▷ VirtualLab Fusion可以用来完成光学系统的光线追迹仿真。 ▷ VirtualLab提供了三维光线追迹和二维光线追迹(点列图生成及自定义评价函数)。 ▷ 在VirtualLab的参数优化过程中所有的引擎模块都可用。 ▷ 通过一个参数的优化可以利用光线追迹完成对光学系统的优化。 ▷ 可以使用不同的优化算法。 QQ:2987619807 |
|