| infotek | 2020-12-01 09:36 |
电光传感器的协同设计和分析(2)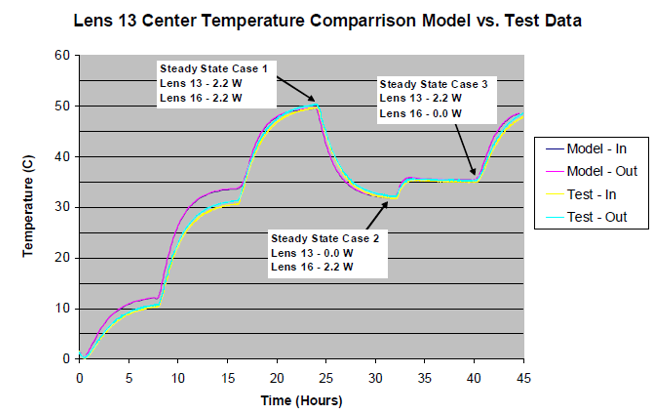 图6.42英寸真空室热瞬态测试结果 表1给出了在热浸渍测试条件下所有可用监测点处我们的模型预测与测量热电偶数据的对比结果。结果与大多数热电偶的测试数据极其吻合。透镜16的预测高于测试结果5C至8C。最大的(7.7C)相差是由于有测试数据读数有问题,因为当对外部透镜桶加热时,透镜的周边(50.5℃)不应该比透镜的中心(52.1℃)更冷。由于用于该测试(支脚等)的支撑结构的模型精确度,透镜16模型预测的一些值可能是错误的。透镜16具有所有透镜元件的这种结构的最大视图。对于两个透镜镜筒热电偶(H_L13_R2和H_L16_R2),也观察到模型预测和测量数据之间的显着差异。这些差异被认为是由于测量中的异常数据。R2热电偶读数远低于其伙伴R1和R3读数,从我们的模型可以看出,这个大的梯度不应该出现在金属外壳的周边。这些热电偶可能没有足够好地结合以获得良好的读数,或者它们可能被放置在不如预期那样接近壳体的加热区域的位置。 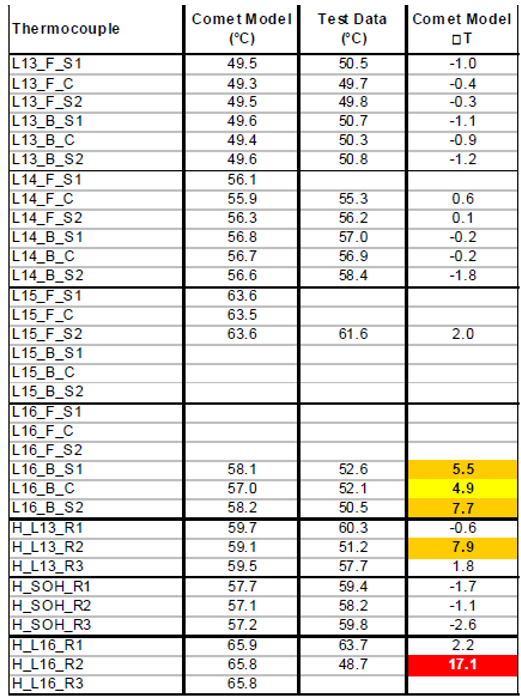 表1.42英寸热浸渍测试比较 用于热浸渍测试的集成STOP模型预测 图7中示出了针对该报告分析的可见光学通道的部分的CAD模型。传感器经过三个单独的热浸渍测试条件-热条件、标称情况和冷条件。对于每个测试,在传感器性能的最终热真空测试期间,光具座(OBA)上的几个点的热电偶读数状态和L13-16上施加的加热器功率是由仪器厂商提供的。该数据通过Excel电子表格导入到我们的集成环境中,并执行了图2所示的STOP过程。 下面给出了冷浸测试条件下的STOP分析结果。图7示出了整个可见通道模型在整个热网上计算的温度分布。图8给出了为L13-16子组件计算的温度分布,仅针对透镜组件计算的轴向热梯度以及为透镜13计算的典型径向热梯度分布。图9给出了如图8中所示计算温度分布的计算的结构节点位移的轴向分。温度场和结构位移用于计算L13-16子组件中每个透镜的最佳拟合刚体位移和波前误差贡献。图10给出了透镜13的一些数据。最后,对整个可见光通道光学规格执行光线追迹和衍射分析,其中变形的L13-16规格替代标准L13-16设计以获得出射光瞳波前和系统MTF数据(图11)。 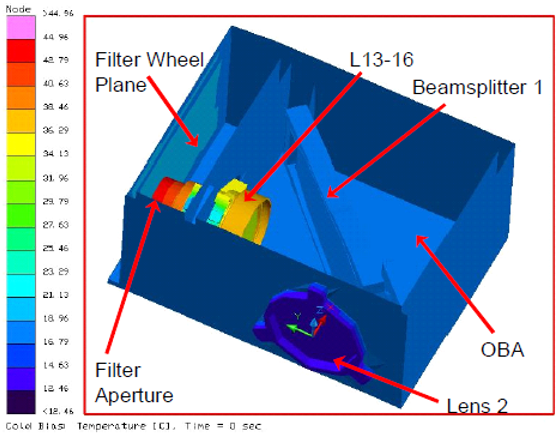 图7.可见光通道CAD模型 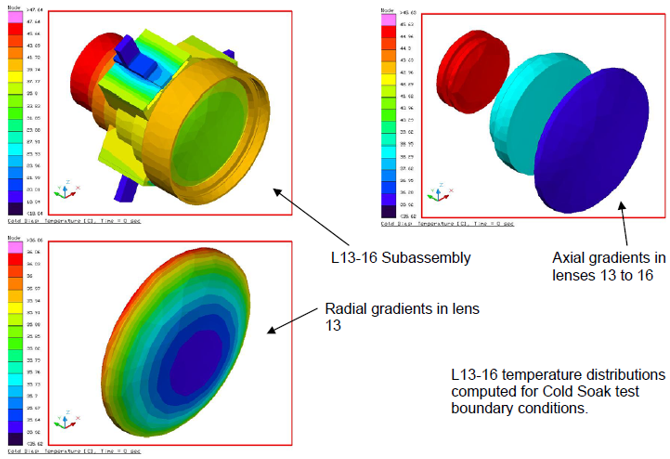 图8.冷浸L13-16温度预测 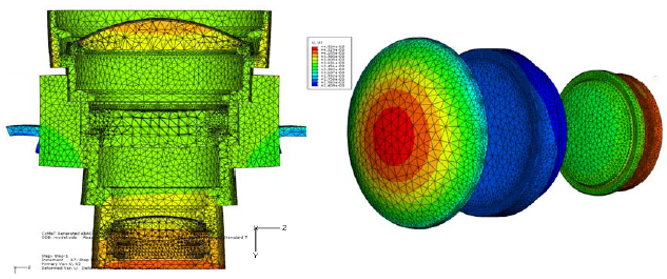 图9.冷浸结构轴向位移  图10.透镜13表面波前误差贡献和最佳拟合刚体位移 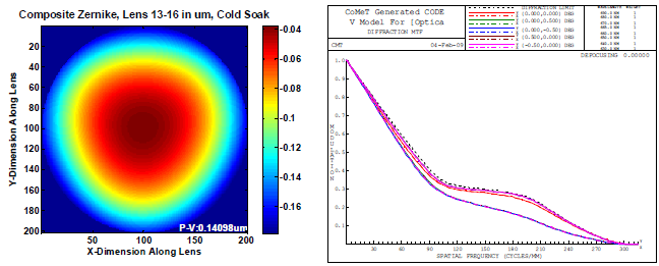 图11.冷浸可见通道波前误差和调制传递函数(MTF) 热瞬态测试的集成STOP模型分析 在热浸测试之后,有效载荷经受一系列周期性变化的热循环,旨在模拟有效载荷将在轨道上看到的瞬态热环境。第三个循环中的边界条件温度和应用L13-16加热器功率的轮廓,如图12所示。使用来自热瞬态测试的数据以下列方式进行三个集成STOP分析。从循环3的平均初始L13-16温度分布开始,在Thermal Desktop中在1230分钟的时间范围内计算温度分布,每30分钟记录一次温度输出。通过SDE软件界面提取三个时间片,在600分钟(热条件)、930分钟(标准条件)和1230分钟(冷条件)下将温度映射到结构网格上用于STOP分析。 对于这三种情况中的每一种计算结果近似于图8至11中所示。 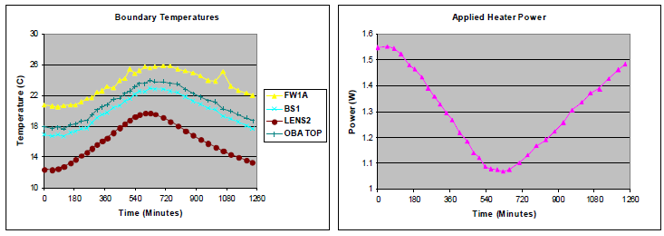 图12.热瞬态测试边界条件和加热器功率曲线 ...... 未完待续 QQ:2987619807 |
|