| infotek |
2020-11-23 09:20 |
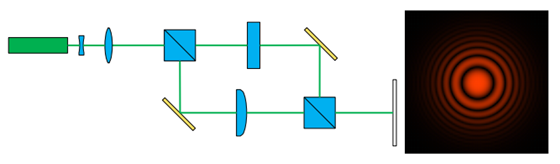
使用相干光模拟马赫泽德干涉仪
测量系统(MSY.0001 v1.1) ,`^B!U3m �
�S�3MMyS�8
应用示例简述 }C}~)qaZv+
�sI@m"�A�
1. 系统说明 �zob^z@�2�
O9r�3^y\>I
光源 gkI�(B2,�/
— 氦氖激光器(波长632.8nm;相干长度>1m) ?�#<�F�xme
元件 ��fS>���W-
— 分束器和合束器,消色差准直透镜系统,位相延迟器,待测球面透镜 %Fa/82:- "
探测器 q+�1�9EJ�(
— 干涉条纹 w�lA�lIvIT
建模/设计 0 oE�w1!cY
— 光线追迹:初始系统概览 V);{o>%�.K
— 几何场追迹加(GFT+): ���0F1 a��
计算干涉条纹。 ��zg���.'�
分析对齐误差的影响。 `��5r*4N�<
z���.
VuY3
2. 系统说明 =V5<�>5"M?
);kO2�7dg
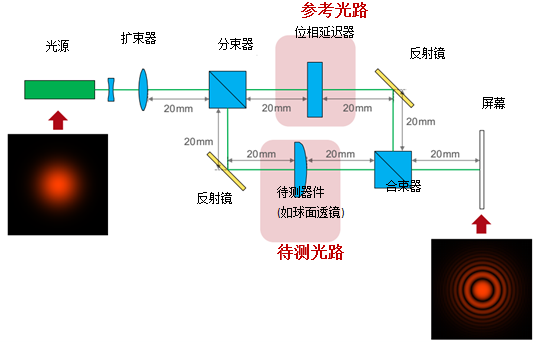
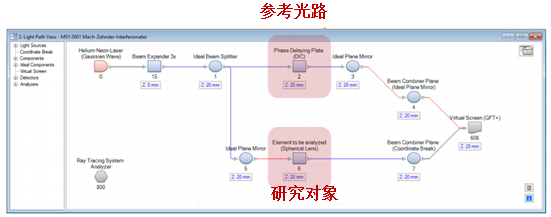
参考光路 �1��U;je,)  �6�m_Y%&
�
3. 建模/设计结果 ��`ih�lKFX
�al F*��L�
 czi$&(N0w$ czi$&(N0w$
�"6['�!rq0
马赫泽德干涉仪的干涉图样的计算 r�qxoqc�Z�
Dq)V]�� Zx
1. 仿真 [D[s�^<RJs
以光线追迹对干涉仪的仿真。 MG*#-<O�V.
2. 计算 #|v\UJ:Pf/
采用几何场追迹+引擎以计算干涉图样。 @N���7X(@O
3. 研究 S`8
�h]�vX
不同对齐误差在干涉图上的影响,如倾斜和偏移 Pz,kSx�e=�
I�iHl"2�+/
利用VirtualLab软件可对马赫泽德干涉仪生成的干涉图案进行研究分析。 /1z�i�(z
�
c���Wl����
应用示例详细内容 >)��=FS.?]
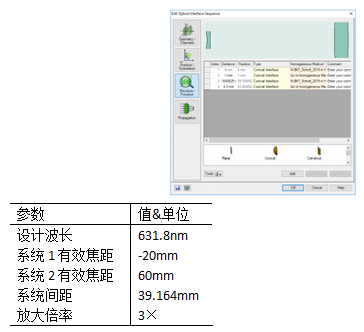
系统参数 "�A��~�\$�
1. 仿真任务:马赫泽德干涉仪 "diF$��Lj�
&{!FE`ZC_
通过使用这种干涉仪设置,可测量两完全相同光束线间的相对相移。 b2aPo�� M=
EA7� ��8&�
这使得可以对一个样品元件引起的相移进行研究。 ^Y�8?iC�<+
�
�\U(qv(T
2. 说明:光源 :;c�Kns0OA
"�E�Q`Q=8�
H��{V�Vxj�
使用一个频率稳定、单模氦氖激光器。 SQD�llG84E
因此,相干长度大于1m Jt\?�,~,��
此外,由于发散角很小,所以不需要额外的准直系统。 �8)s}>:�}�
在入射干涉仪之前,高斯波以瑞利长度传播。 1.+0=M��[h
m=j��xTZK�
 -��|\V'��� -��|\V'���
26B]b{Iz{
3. 说明:光源 #K.OJ�JaG
@�Hw#O33/'
�_���Jx.?8
采用一个放大因子为3的消色差扩束器。 ��F"�FGP�k
扩束器的设计是基于伽利略望远镜。 mHrt)0��\_
因此,在光学表面序列(OIS)中结合了一个扩束和准直系统。 *v
1�h��Mk
与开普勒望远镜相比,在扩束系统中不会成实像。 N�Y�A��,�
4. 说明:光学元件 �`�w�j<d>m
{'�C PLJ{R
8i�aP(�*J
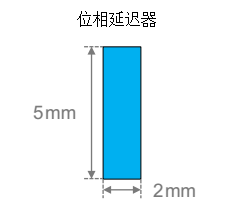
在参考光路中设置一个位相延迟平板。 9�_�)�*�b�
位相延迟平板材料为N-BK7。 qF� C0$:z&
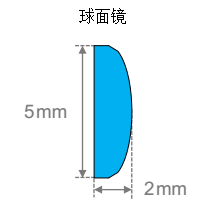
所研究的元件为球面镜,其曲率半径为100mm。 @W[��`^jfQ
透镜材料为N-BK7。 :*�u� .=^�
其中心厚度与位相平板厚度相等。 w[}5qAI5*f
Q�'/v-bd?o
S�hb�W[*�5
5. 马赫泽德干涉仪光路视图 s_S[iW`�l=
�?9'Ukw`
g
�lqh+yX%*
增加消色差系统和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 `n7*6l<k~4
由于VirtualLab的相对位置系统,必须设置Z轴方向的距离。 |l'�BNui�U
:l�~Wt7��R
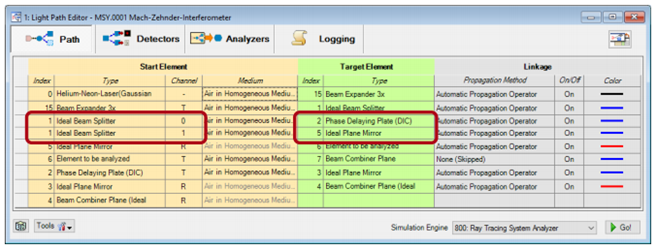
6. 分光器的设置 hC�2�@G�q
i eQQ{iGJH
_�C���n[|E
w��g?GE��Y
为实现光束分束,采用理想光束分束器。 �-X�BD WV
出于该目的,在光路编辑器中建立两次光束分束器。 gg�
���$�/
随后的组件(如相位延迟板和理想的反射镜)连接到通道0和通道1,对应于两个光束分束器 $L%��gQkz_
�z/Z
0�cM#
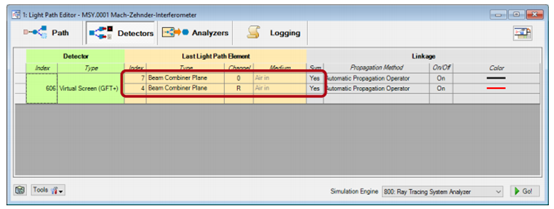
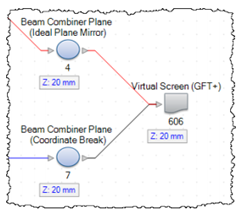
7. 合束器的设置 �@c,�Qj$\1
7vO3+lT/Y;
9>?3�FMKdY
'�*gY45yT`
两束光的直接通过虚拟屏幕探测器进行叠加(GFT +)。 �MG6t�aOO!
为此,必须选择两个输入通道的叠加,才能得到期望的干涉图。 h��DBVL"��
�;U$Fz~rJ�
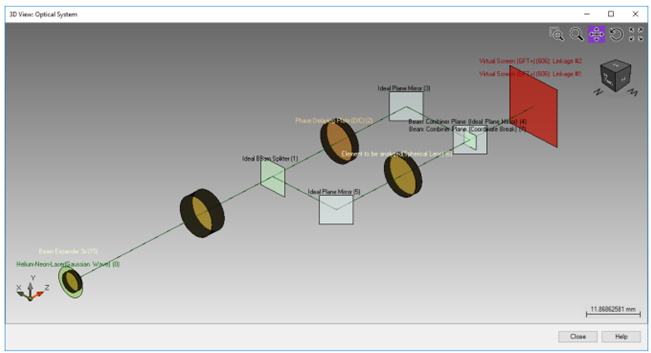
8. 马赫泽德干涉仪的3D视图 F�bO\�#p s
x��h�|NmZg
-=5]��B� ;
增加扩束器和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 OwRH
:�l
应用示例详细内容 Y,0D+s�O4�
仿真&结果 �R8ZI}C�1�
]$7��d��kP
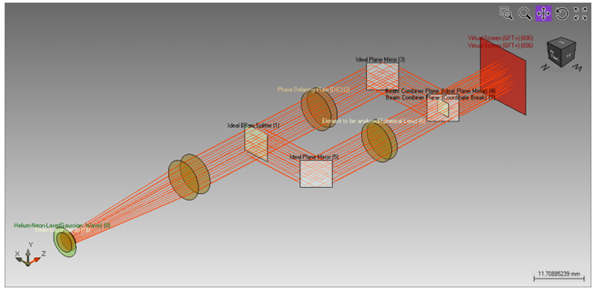
1. 结果:利用光线追迹分析 #$k6OlK-r"
��.Y�OC�|\
首先,利用光线追迹分析光在光学系统中的传播。 %z1y3I|`[t
对于该分析,采用内嵌的光线追迹系统分析器。 Eci,];��S7
X'�[93
C|K
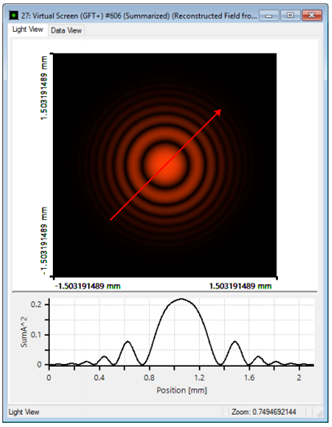
2. 结果:使用GFT+的干涉条纹 f-]5Z�hM'
U4PnQ�
K,
luLt~A�3H$
现在,利用几何场追迹加引擎计算干涉图样。 =XA��F���W
由于采用高斯光束,图形边缘光强衰减迅速。 jiAKV0lX
W
因为干涉长度大,干涉条纹显示出较明显的极大值和极小值。 i_<�U���k8
.�zDm�{�_'
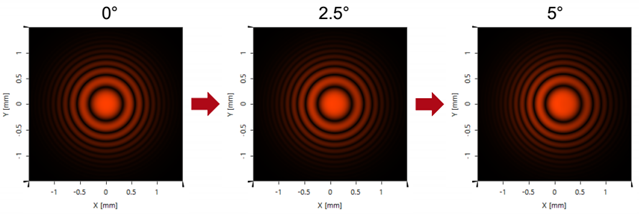
3. 对准误差的影响:元件倾斜 ;�(�0<5LQ�
J+��IkTq�w
元件倾斜影响的研究,如球面透镜。 XN�ZW� �J
因此,通过使用独立方向和参数运行,原件角度由0°变化至5°。 ?VM4_�dugf
结果可以以独立的文件或动画进行输出。 Q--Hf$D�]H
zNg�8�Oq�&
4. 对准误差的影响:元件平移 �2�o5Pbdel
L`�"B;a�&�
元件移动影响的研究,如球面透镜。 %N.qu_,�IZ
现在,通过使用独立位置和参数运行,组件X位置有0mm修正为0.5mm。 �-�%I 0��Q
结果同样可以以独立的文件或动画进行输出。 #0�*O�kZMt
 �znVao %b �znVao %b
5. 总结 �P`��ZYm�
马赫泽德干涉仪的干涉图样的计算 zI��$24L9*
�@�-d0�~.S
4. 仿真 �Ic!8$NhRS
以光线追迹对干涉仪的仿真。 LA\�)�B"{J
bi��=IIVlH
5. 计算 >�S]_{pb��
采用几何场追迹+引擎以计算干涉图样。 RlW�7l1h�&
Wa��{()Cz
6. 研究 *U{E�[<k{�
不同计算误差在干涉图上的影响,如倾斜和偏移 �3d_PY,�=1
H�W,2x}�[�
利用VirtualLab软件可对马赫泽德干涉仪生成的干涉图案进行研究分。 *d%U]�Hby,
xW����h�i>
扩展阅读 ��9b�E/7v�
)�U$]J*LI�
1. 扩展阅读 he�F<UM��I
以下文件给出了在VirtualLab中如何设置测量系统的更多细节。 P�.� V� �#
=�5�zx]N1r
开始视频 PN�n-�@=%�
- 光路图介绍 ��Q|3SYJf�
- 参数运行介绍 �
f�a=OeuI
- 参数优化介绍 0SJ7Q�Ro|K
其他测量系统示例: "@h 5�
S�F
- 迈克尔逊干涉仪(MSY.0002) �utJ�z�� e
�f�D���>0�
�"?[7oI}c&
QQ:2987619807 kJ�y���
bA
|
|