| infotek | 2020-11-04 10:50 |
在一个微镜激光扫描系统中镜像差对光束质量的影响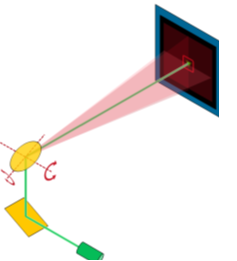 概括案例 1.系统细节 光源 - 绿色激光二极管 元件 - 基于单扫描微镜的激光扫描系统,例如MEMS(微机电系统) 探测器 - 光线可视化检查(3D显示) - 场分布和相位计算 - 光束参数(M2值,发散角) 建模/设计 - 光线追迹:首先概览系统性能 - 场追迹: √ 光束传播包含表面像差 √ 分析生成光束的形状和质量 2.系统图片 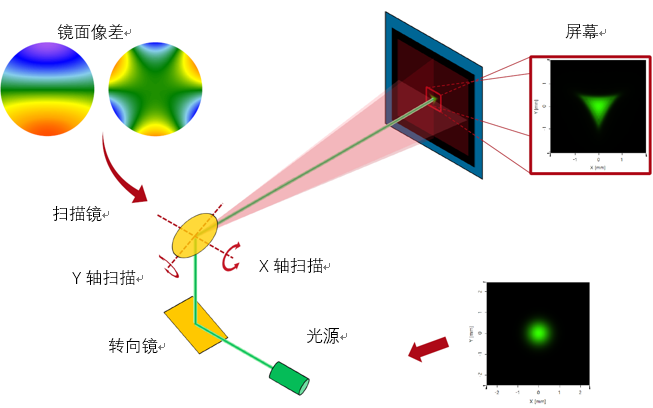 3.模拟和设计结果 镜像差(由泽尼克多项式表示): 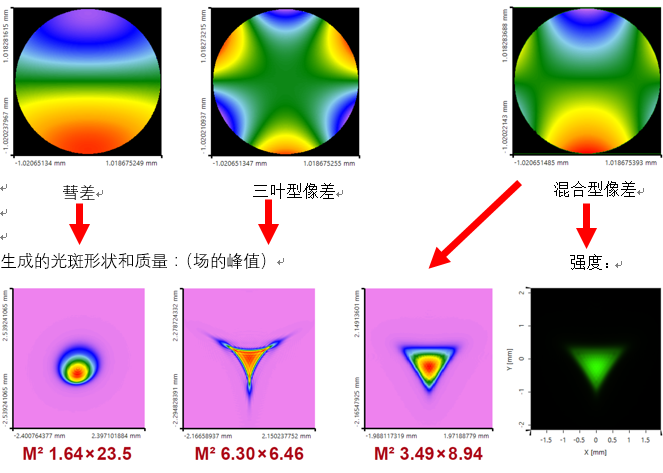 4.总结 基于单扫描微镜的激光扫描系统(例如MEMS)中的镜像差进行建模和仿真。 1) 模拟 通过使用光线追迹方法验证激光扫描设置 2) 建模 使用泽尼克标准界面来模拟静态或动态形式的复杂镜面像差 3) 分析 为了计算场分布和评价光束形状和参数,应用经典场追迹引擎 复杂的系统,如基于单微镜的激光扫描仪可以通过使用VirtualLab Fusion来模拟。此外,几乎所有类型的表面变形都可以通过引入泽尼克像差到扫描镜来模拟。因此,可以根据扫描的位置评估光束形状和质量。 详细案例 系统参数 1. 此案例的背景和目的 作为一个扫描镜必须包含两个扫描轴以及考虑一个更复杂的倾斜操作(倾斜的方向并不是独立的)。 另外,将表面像差引入到扫描镜,可以是静态或动态类型。 因为泽尼克多项式非常适合描述几乎所有类型的像差,它们可用于演示表面偏差。 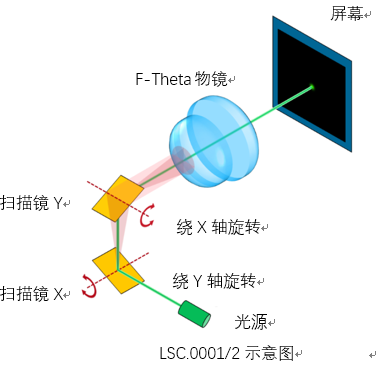 2. 模拟镜像差:泽尼克界面 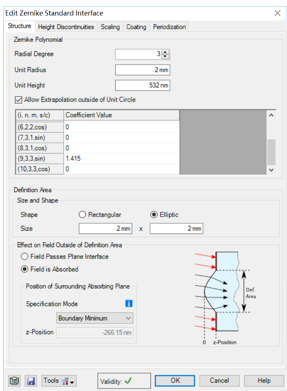 为了模拟静态或动态镜像差,使用泽尼克界面。 通过使用泽尼克多项式,可以适当地插入任意相位或表面偏差。 多项式可以通过系数分类,例如使用Noll’s多阶组合。 具体系数包含多项式的阶数和径向分解级次。 例如,系数3 1 0意味着多项式3和级数n=1,级数m=0。 这个定义也在VirtualLab fusion的泽尼克界面实现。 3. 模拟任务:LCS中的镜像差 为了研究镜像差,讨论一个基于固定转向镜和一个扫描微镜器件的激光扫描系统(例如MEMS)。 镜像差将假定为泽尼克多项式。  例如,将演示彗差(7 3 1)和三叶形(9 3 3)形状的像差。 4. 规格:准直激光光束 高斯光束由激光元件的单模激光二极管发射出。 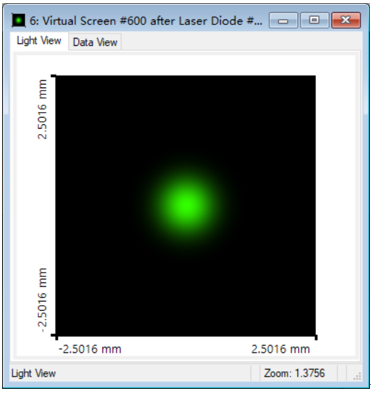  5. 规格:2D MEMS扫描微镜芯片 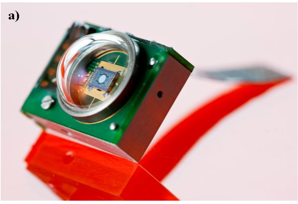 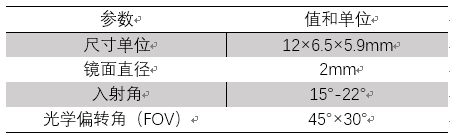 6. 激光扫描系统的光路图 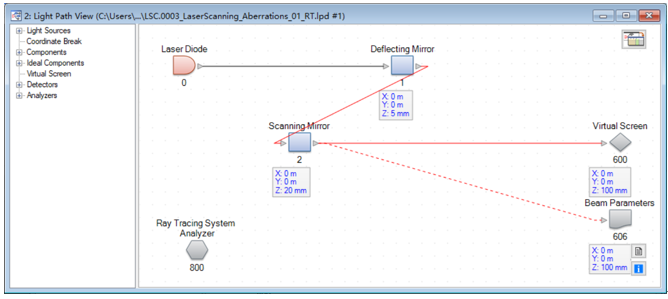 由于VirtualLab Fusion的相对定位系统,只需要确定在z方向的距离。 理想像差都包含在扫描镜元件内。 7. 扫描操作中的镜面倾斜 因为扫描微镜的倾斜与两轴有关,倾斜操作并不是独立的。 为了计算理想扫描位置的倾斜角,必须考虑反射三维定律:  (k为归一化波矢量,n为镜表面法向量和归一化因子) 这个向量关系可以使用VirtualLab Fusion的参数耦合功能解决。 因此,需要的倾斜角是由理想扫描位置自动计算得到。 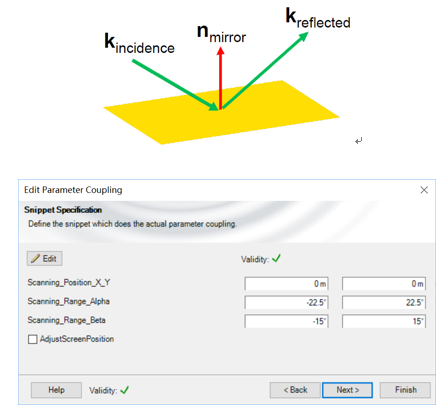 详细案例 仿真和结果 1.结果:使用光线追迹分析 首先,应用光线追迹(Ray Tracing)研究光在光学系统的传输。 使用内置的光线追迹系统分析器(Ray Tracing System Analyzer)来进行分析。 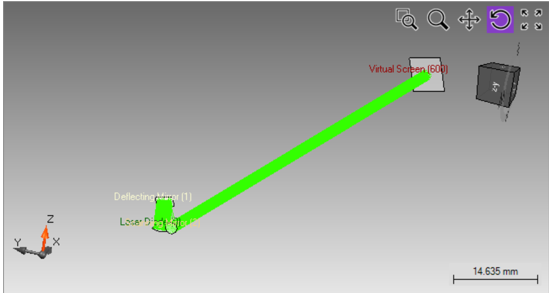 所用文件: LSC.0003_LaserScanning_ Aberrations_01_RT.lpd 2. 模拟镜像差:彗差 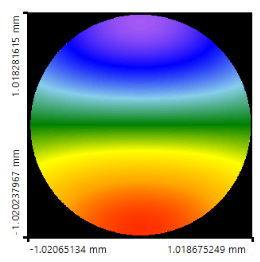 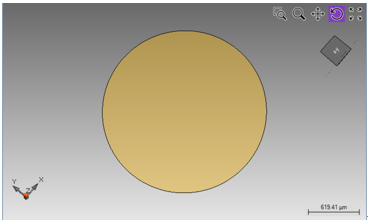 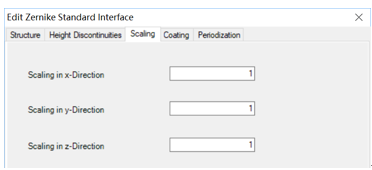 所用文件:LSC.0003_LaserScanning_ Aberrations_02_Coma.lpd 3. 结果:彗差整形镜像差 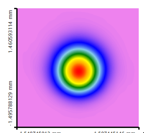 研究中心扫描位置(电场幅度)的光斑形状和质量 无像差(M21.00×1.00)的初始位置形状 在波长(PV)中,各类像差的大小 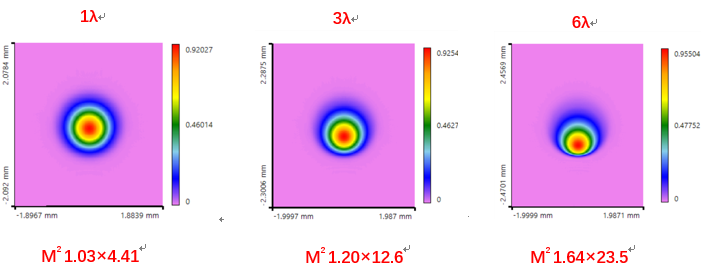 计算不同扫描位置的光斑形状和5λ峰谷的彗差类型。 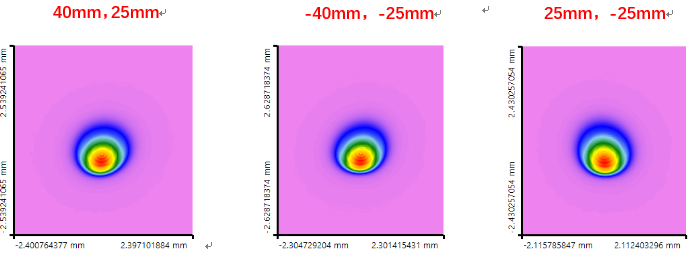 所用文件:LSC.0003_LaserScanning_ Aberrations_02_Coma.lpd 4. 模拟镜面像差:三叶形 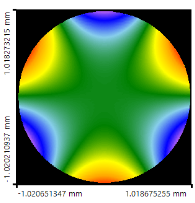 第二个例子:多项式展示出系数9 3 3描述了三叶形状的像差。 再次,选择这样的参数,对应于一个波长(峰谷)的变化。 使用z尺寸参数再次变化像差的大小。 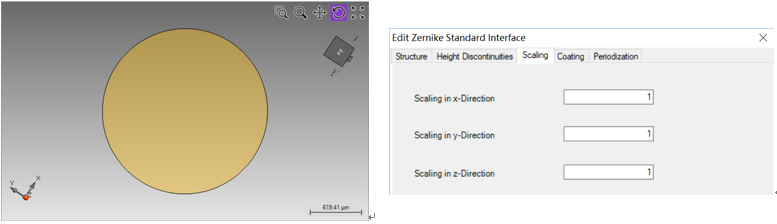 所用文件: LSC.0003_LaserScanning_ Aberrations_04_Trefoil.lpd 5. 结果:三叶型整形镜面像差 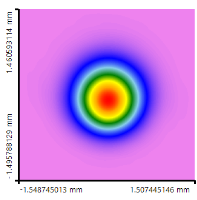 模拟中心扫描位置(电场振幅)的光斑形状和质量。 无像差(M21.00×1.00)的初始点形状: 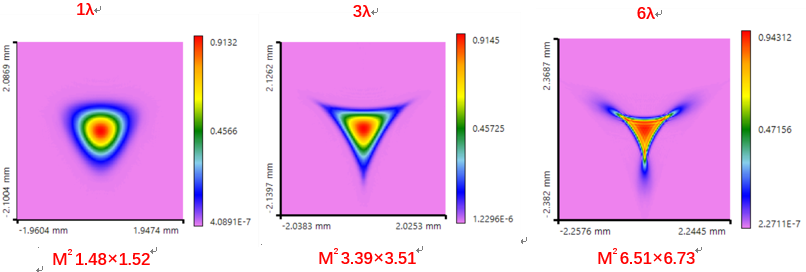 所用文件:LSC.0003_LaserScanning_ Aberrations_05_Trefoil.run 计算不同扫描位置的点形状和5λ峰谷的一个三叶型像差。 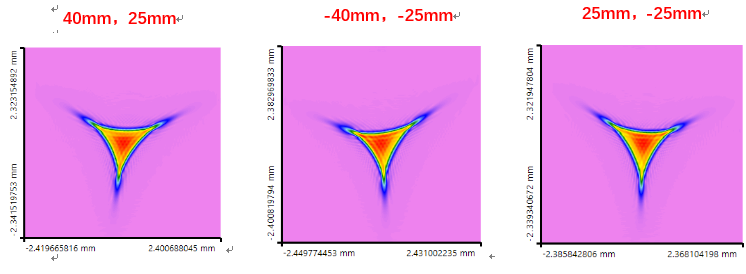 6.结果:像差扫描  在静态像差的情况下,对所有偏转角来说镜面偏差是常数。 通过在理想扫描区域应用一个参数运行来生成扫描图案。 如例所示,显示一致的图案扫描(5mm空间)。 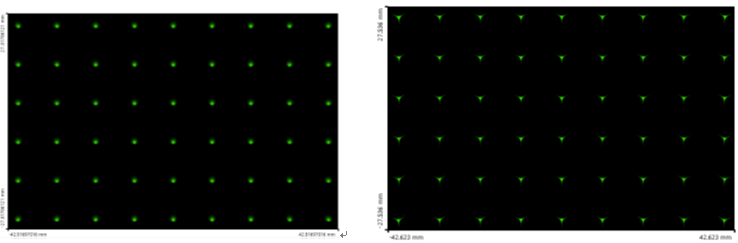 所用文件:LSC.0003_LaserScanning_ Aberrations_07 & 08_Static.lpd 7. 模拟混合镜像差 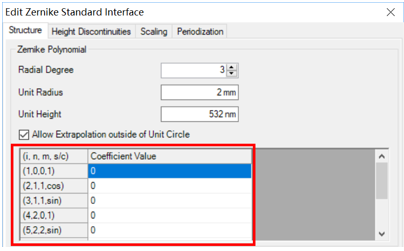 为了描述更加复杂的镜像差,可以组合表面的不同形状。 如果是泽尼克类型的像差,可以通过设置相应的系数在界面中结合不同类型。 如果使用不同类型的界面更合适,那么组合的界面使两个或更多类型的界面合并(如泽尼克类型)。 如果发生静态和动态像差,也可以使用合并的界面。 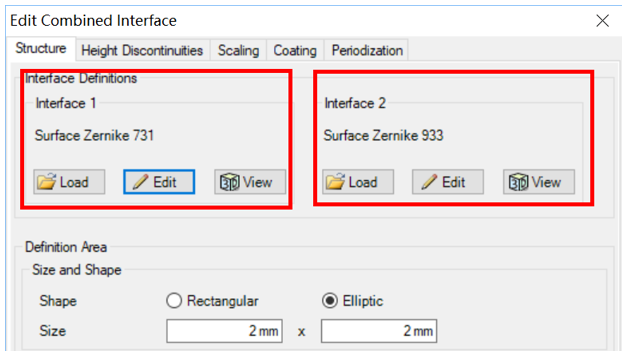 8.结果:合并后的镜像差 利用合并后的界面来模拟两个不同镜面像差的组合。 在静态和动态影响像差的情况下,一个界面设置为代表的静态部分,另一个代表动态效果。 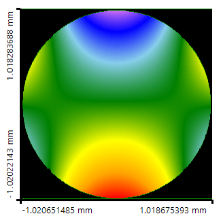 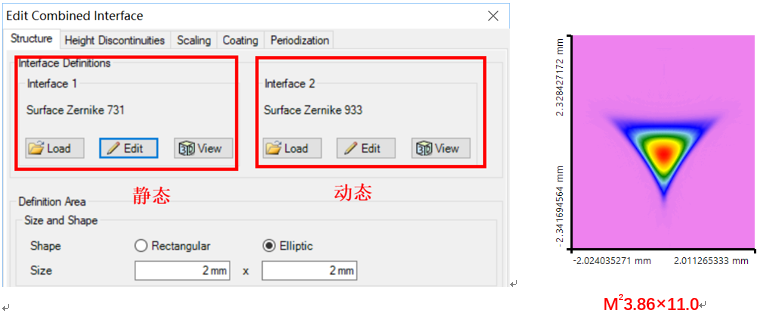 所用文件:LSC.0003_LaserScanning_ Aberrations_06_Combined.lpd 9. 结果:静态和动态镜像差 现在使用合并后的界面来模拟静态和动态镜面像差。 在这个例子中,根据扫描镜的偏转(通过使用参数耦合),第二个界面(泽尼克9 3 3)像差的大小是不同的。  所用文件:LSC.0003_LaserScanning_ Aberrations_09_Dynamic.run 10.总结 在基于单扫描微镜的激光扫描系统中(例如MEMS),模拟和研究镜面像差。 仿真 通过使用光线追迹,验证激光扫描系统 模拟 使用泽尼克标准界面来模拟复杂的静态或动态类型的镜面像差 分析 应用经典场追迹引擎来计算场分布和评价光束形状和参数 复杂的设置,如基于单微镜的激光扫描仪可以通过使用VirtualLab Fusion来模拟。此外,几乎表面失真的所有类型都可以通过将泽尼克像差引入到扫描镜来模拟。因此,可以通过扫描的位置研究光束形状和质量。 11. VirtualLab Fusion的其他特性 在本例中,您受益于以下选择的特点: 参数运行 - 生成包含所有光学效果的扫描模式 - 不同参数的简单变化,例如模拟静态和动态像差 参数耦合 - 在屏幕上的理想位置,自动调整扫描镜的旋转方向。 进一步阅读 1.进一步阅读 获得基本视频 - 光路图的介绍 - 参数运行的介绍 关于这个案例的文档 - LSC.0001:Performance Analysis of Laser Scanning System Using an Aspherical Lens - LSC.0002:Performance Analysis of Laser Scanning System Using an F-Theta Objective 2. 进一步阅读:参考文献 [1]MaradinLtd. website: www.maradin.co.il [2]www.wikipedia.org/wiki/Microscanner QQ:2987619807 |
|