SYNOPSYS 光学设计软件课程十二:非球面激光光束整形器
sr
�sD�n�f
;Pnz4Y4|eU
在第11课中,我们设计了一个激光束整形器,以平整化小型HeNe激光器的高斯光束轮廓。 为了降低制造成本,我们尝试用球面的设计来达到这个目标,因为它比非球面更容易制造。 使用一个六片透镜设计,这似乎符合我们的规格。 也许这种设计可以进一步改进,但我们也必须要考虑六片球面镜是否比两片非球面镜更便宜。 如果不是,那么非球面设计看起来更具吸引力。 aYkm]w;C�
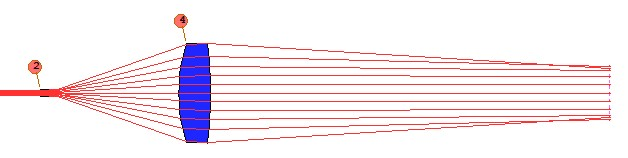
让我们使用和第11课中相同的双透镜结构开始,进行修改,以便我们只将光通量平坦化为1 / e ** 2点。 得到两倍的孔径似乎是不切实际的,需要需要再次优化。 下面是初始结构文件: |\*7J�!Liv
RLE � }�aR�V)F
ID LASER BEAM SHAPER ! Beginning of lens input file ��"+[�:\�
WA1 .6328 ! Single wavelength �$e�_A( |
UNI MM ! Lens is in millimeters b-@�6w�(�j
OBG .35 1 ! Gaussian object; waist radius -.35 mm; define full aperture at the 1/e**2 point. lnEc5J@c>i
1 TH 22 ! Surface 2 is 22 mm from the waist . d�/+s�R@\
2 RD -5 TH 2 GTB S "�$;=�8O5O
SF6 ! Guess some reasonable lens parameters; use glass type SF6 from Schott catalog `
C�dk
b5
3 UMC 0.3 YMT 5 ! Solve for the curvature of surface 3 so the marginal ray has an angle of 0.3; find ��U�z>5!_�
!spacing so ray height is 5 mm on next surface i�L)q':xz�
RD 20 TH 4 PIN 2 ! Guesses for surface 4 s{2BG9s���
&-470Z%/��
UMC 0 TH 50 ! Solve for curvature of 5 so beam is collimated. '�{@hBB+ D
7 ! Surfaces 6 and 7 exist 8G�?'F�${`
�XD<7d")I�
AFOCAL ! because they are required for AFOCAL output. � 2(YZTa�Y
END ! End of lens input file.
dur}3oS0p
P)XkqOGpT9
优化命令如下 $Ud�-aRl�D
CHG t7H2z}06=h
NOP ! Be sure there are no pickups or solves. 确保没有拾取或解决方案。 9qc1^F�s�~
4 PIN 2 o 4L9Xb7=G
5 TH 10 UMC 0 ! move surface 6 before the caustic在焦散前移动表面6 S&Q1�K��y^
END )Mx[;�IwE
M�G�CwT@�P
PANT ! Start of variable parameter definition. 开始定义变量参数 ��\5BI!<�
VLIST RAD 2 3 4 5 ! Vary four radii. 四个半径变化 �f9cS^v_�:
VLIST TH 3 ! Vary the central airspace. 改变中心的空气间隔。 �U\&kT/6vh
VY 3 CC ! Vary the conic constant on surface 3. 改变表面3上的圆锥常数 �C���eN�pJ
VY 4 CC ! And on surface 4. 改变表面4上的圆锥常数 p4\�%*ovQt
VY 3 G 3 ! Add three aspheric terms to surface3. 向表面3添加三个非球面项 �{:$0j|zL1
VY 3 G 6 W�ct
+�T,8
VY 3 G 10 Ro*$7j0!Hf
VY 4 G 3 ! And three to surface 4. 表面4也添加3个球面顶 yb�2*K+K�v
VY 4 G 6 V�jS �%!�P
VY 4 G 10 h�
`�d(?1
END @�t�dX=\[~
j�Jg9M'@2!
AANT ! Start of merit function definition. 开始评价函数定义 7 �6~x|�6)
AEC ! Enable automatic edge feathering control. 启用控制边缘厚度 h6}oRz9=�g
ACC ! Enable automatic center thickness monitoring启控制中心厚度 m�HE4�Es0�
ASC ! Enable automatic slope control, so curves don’t get too steep. 启用自动坡度控制,因此曲线不会太陡峭 y%Ui)UMnw]
LUL 100 1 1 A TOTL ! Limit the paraxial total length to no more than 150 mm. 限制近轴总长度不超过150毫米。 E1_FK1�*V;
M 5 100 A P YA 0 0 1 0 LB1 ,�-ZAI� b*
M 5 100 A P YA 0 0 1 0 LB2 ! Assign a target of 5 mm to the marginal ray on surfaces 5, 6. 为表面5,6上的边缘射线分配5 mm的目标。 %�;(�+�s�7
��#\"8sY,j
M 0 1 A P FLUX 0 0 1 0 LB1 ! Target the flux difference between the marginal ray point and the on!axis point to 0 on surface 6. 瞄准边缘射线点和on之间的通量差!在表面上轴线指向0。 %@�'9<�i8o
M 0 1 A P FLUX 0 0 .99 0 LB1 ! Target the flux at the 0.99 aperture point. 将光通量定位在0.99孔径点。 +�^{;o0kcx
M 0 1 A P FLUX 0 0 .98 0 LB1 ! And so on, for a set of zones. 等等,对于一组区域进行设置。 w�:�I^iI�.
M 0 1 A P FLUX 0 0 .97 0 LB1 yL^1s\<ddW
M 0 1 A P FLUX 0 0 .96 0 LB1 BP6;�dF5�E
M 0 1 A P FLUX 0 0 .95 0 LB1 l"p�%]\tZ
M 0 1 A P FLUX 0 0 .94 0 LB1 KO�v�
a�r0
M 0 1 A P FLUX 0 0 .93 0 LB1 )z��lksF��
M 0 1 A P FLUX 0 0 .92 0 LB1 6C��9K�T;6
M 0 1 A P FLUX 0 0 .91 0 LB1 ��.Ej `!��
M 0 1 A P FLUX 0 0 .9 0 LB1 g�-U'{I5�F
M 0 1 A P FLUX 0 0 .89 0 LB1 ���N�c
F��
M 0 1 A P FLUX 0 0 .88 0 LB1 G1
��%c<1Y
M 0 1 A P FLUX 0 0 .86 0 LB1 �Hq�8�<�g$
M 0 1 A P FLUX 0 0 .84 0 LB1 V�=I��au_
M 0 1 A P FLUX 0 0 .82 0 LB1 �9-eYCg7C|
M 0 1 A P FLUX 0 0 .8 0 LB1 zNuiB�LxDs
M 0 1 A P FLUX 0 0 .7 0 LB1 }P#%a�E&-�
M 0 1 A P FLUX 0 0 .5 0 LB1 us��\@��n"
M 0 1 A P FLUX 0 0 .3 0 LB1 JXUnhjB,B�
GSO 0 .01 10 P ! Target the OPD of an SFAN of 10 rays to zero, with a weight of .01将10条光线的SFAN的OPD定为零,权重为.01 g3 6oE�z~|
GSR 0 50 10 P ! And also target the ray angles to zero. 并且还将光线角度定为零。 SE)�_�5|k*
END T�5)Xl��'Q
z{bM�W^��F
SNAP S&}7jR�H1�
SYNO 50 �cv�eTrY}g
c!T�^�JZBb
虽然这很简单,但应该指出:为什么GSR用于瞄准光线角度?通常,GSR控制每条光线相对于主光线的实际X坐标 - 但由于此系统处于AFOCAL模式,输出是准直的,因此该案例将以输出角度为目标。 �daE/v.a4|
如何指定光线和光通量目标应在表面6?这个系统共有七个表面,计算AFOCAL角度转换所需的两个虚拟面。助记符“LB1”表示“最后但只有一个”,并且在处理输入时它被表面6替换。 1GN>,Lb:�o
此处,选择两个表面上圆锥系数和三个非球面系数为变量。还有更高的系数,这种形式的非球面有22个系数可用,但只有系数G3,G6,G10,G16,G18,G19,G20,G21和G22是旋转对称的。让第4,第6,第8和第10 - 到20阶非球面项作为变量,在这里没有使用最后的六个系数。 �9G` 2t~%�
让我们运行这个MACro。可能会得到更好的结果,模拟退火几个周期。 �E^�zgYkZO
这使得评价函数降至2.1E-5,这表明已经找到了一个很好的解决方案。 ZZ�A!Y9ia2
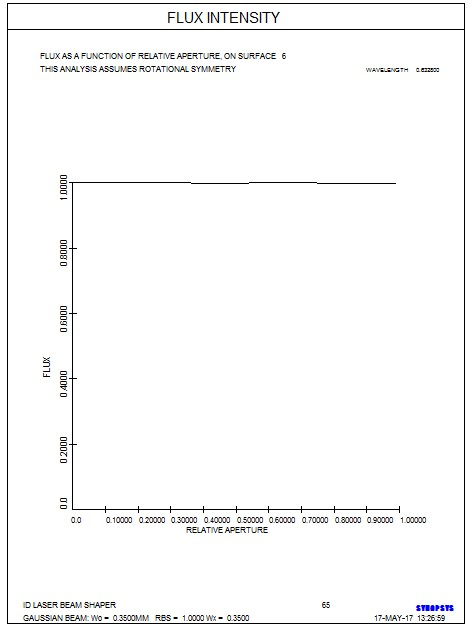
这是最终设计的FLUX图: d%�Jl9!�u�
曲线几乎完全均匀,那么OPD误差怎么样? k�X�����zm
SYNOPSYS AI>OPD ��GBz�C<e#
J?)vsnD.H�
SYNOPSYS AI>SFA 5 P fc.�_*y#AS
��54WM*FZ�
ID LASER BEAM SHAPER 115 20-MAY-17 13:32:54 okoD�2�6tK
SAGITTAL RAY FAN ANALYSIS ��6%�H8Q�v
�)|@b
GEk
FRACT. OBJECT HEIGHT HBAR 0.000000 GBAR 0.000000 �cR�}}�N�F
COLOR NUMBER 1 SJoQaR,)�>
v Q[{<��|K
REL ENT PUPIL WAVEFRONT ABERR W:O<9ZbQ_�
XEN OPD (WAVES) T#6'�]�D��
________________________________ ~�f�I&F��|
0.200 -0.000865 0.400 >&��TSz�5Q
-6.675373E-05 0.600 fO��[X<|�9
0.000361 3H%�R`ha��
0.800 -0.000651 pRx^O
F(3�
1.000 -0.000791 Vo+d�3����
~"�\s�L�;B
这种设计基本上是完美的,误差小于1/1000,并且它只需要两片透镜。 看起来不需要像第11课的六片透镜那么多镜片的设计! +�L;[�-]E8
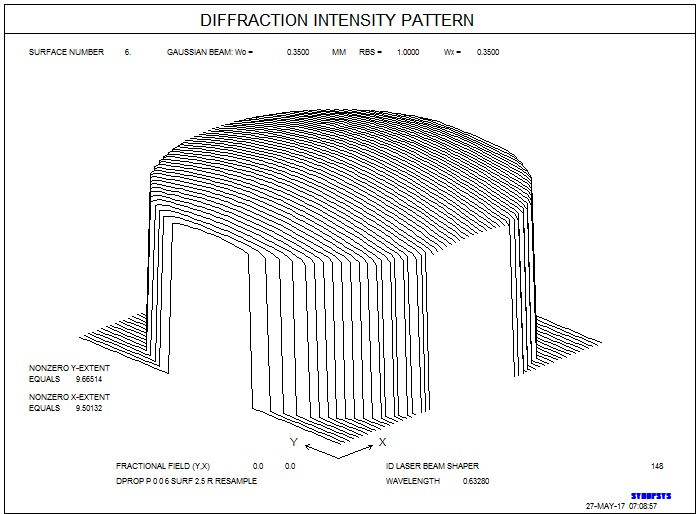
为了确保正确性,还要检查DPROP的输出波前: `!S5F�E�"-
STORE 9 7��{RI`Er`
CHG �@g9j+D�cU
1 SIN .{k(4_�Q?I
1 TH 0 �Re5����m�
CFIX K���SIH�1E
END a�O.�'(kk8
DPROP P 0 0 6 SURF 2.5 R RESAMPLE d8<Lk9H9R�
GET 9 `��]\4yT�d
)b�
m|],'
这正是我们追求的目标。 在这里,该程序再次确定衍射不起重要作用,并且计算纯粹是几何的。 7loCb�4Hv�
现在唯一的问题是非球面镜的制造难度。查看非球面镜与最近拟合球面(CFS)的距离。 $5G�vF1��
ADEF 3 PLOT ADEF $R�v}L'��L
4 PLOT H��.��uflO
x�,E#+�
m�
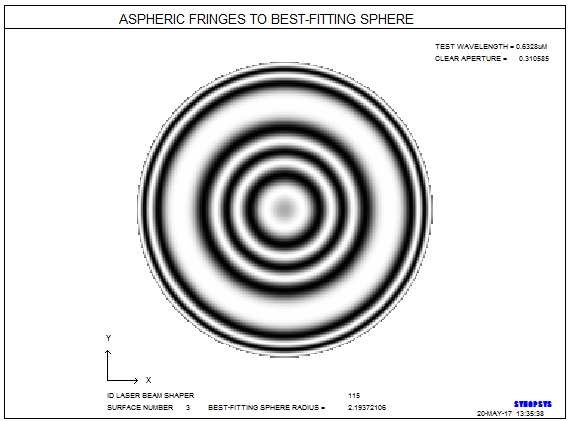
这两个非球面镜都距离CFS只有几微米。 看来这是可控的。 看看相对于CFS的边缘模式: jz�'�t�!wj
ADEF 3 FRINGES �� �twz���
这样的非球面面型,对加工厂来说,是可以被加工出来的。请参阅第21课,了解如何使用CLINK优化功能来实现这一目标。
|