SYNOPSYS 光学设计软件课程六:三阶像差的重要性
� �F#�0y0|
[�'<Q402:.
很多镜头设计初学者和许多镜头设计师都认为,像差必须得到很好的控制。 他们只说对了一部分 - 但这些要求总是指三阶像差,但如果要求三阶像差都为零。 这是不明智的。 M]FA
�y�"E
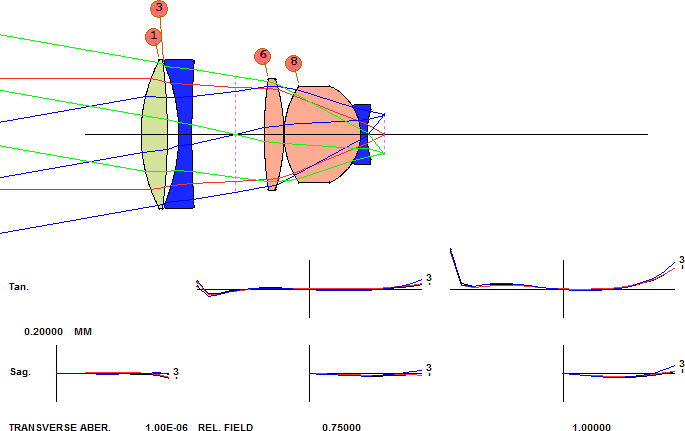
复制以下透镜文件并将其粘贴到EE编辑器中并运行它。 这是一个五片式透镜。 �%2H0JXKa,
RLE �8>U{>]WG�
ID FIVE-ELEMENT LENS 124 ��s|p,��UK
WAVL .6562700 .5875600 .4861300 ~.Fe��LW�P
APS 5 �(T290a9y>
UNITS MM OZDd������
OBB 0.000000 10.00000 25.40000 -8.63996 0.00000 0.00000 MHl �f�fj
25.40000 .b.p��yVk�
MARGIN 1.270000 <1t.f}}uX
BEVEL 0.254001 mEL<d,�XhI
0 AIR �.A(Q��qL>
1 RAD 73.9295960000000 TH 12.00000000 QCm93YZs6E
1 N1 1.79798347 N2 1.80318130 N3 1.81530119 �g�0�R��ny
1 GTB S 'LASFN30 ' ;��k����W+
1 EFILE EX1 34.000000 34.000000 34.000000 0.000000 %�A�q�t0e
1 EFILE EX2 34.000000 34.000000 0.000000 C?x��ah?Sk
2 RAD -263.9335099999995 TH 5.22356650 AIR �Q��cW6o,
2 EFILE EX1 34.000000 34.000000 34.000000 �Ly\ ���`�
3 RAD -81.3505230000000 TH 6.00000000 }�MUQO<�=*
3 N1 1.83648474 N2 1.84664080 N3 1.87201161 O4)'78A�Tp
3 CTE 0.830000E-05 }d�a}vR"iL
3 GTB S 'SF57 ' !?AgA�sSmc
3 EFILE EX1 31.841015 33.619003 34.000000 0.000000 h>w�(Th\H�
3 EFILE EX2 33.365005 33.365005 0.000000 wwvS05=�[T
4 RAD 553.8617899999995 TH 19.92504900 AIR yj:<�3_-C*
4 EFILE EX1 33.365005 33.365005 34.000000 UF_?T.R�l^
5 CV 0.0000000000000 TH 13.18557900 AIR �Uy�Fvj4SU
6 RAD 169.2089400000000 TH 9.00000000 /$EX�-!ie�
6 N1 1.67418625 N2 1.67790015 N3 1.68646733 �E�gE%�NY~
6 GTB S 'LAKN12 ' 3^jk�d)xw�
6 EFILE EX1 25.241916 25.241916 25.495917 0.000000 teQ�<v[W�.
6 EFILE EX2 25.241916 25.241916 0.000000 1�
N{u�nS�
7 RAD -83.9867310000000 TH 0.10051658 AIR ^ gy"$F3{`
7 EFILE EX1 25.241916 25.241916 25.495917 �Jw+k=>���
8 RAD 39.2493850000000 TH 34.99484900 =c(t;u6�m-
8 N1 1.67418625 N2 1.67790015 N3 1.68646733 sKg
IKYG}T
8 GTB S 'LAKN12 ' =��p��T�}]
8 EFILE EX1 22.063038 22.063038 22.063038 0.000000 #<$�pl]>}t
8 EFILE EX2 22.063038 22.063038 0.000000 �>'eY/>�n{
9 RAD -24.3037950000000 TH 3.00000000 8��I>'x��f
9 N1 1.79607463 N2 1.80516268 N3 1.82772732 rt�j�UHhF
9 CTE 0.810000E-05 q0m>��NA
�
9 GTB S 'SF6 ' u5'jIq��lU
9 EFILE EX1 12.935701 12.935701 13.697701 0.000000 6E^h#Ozl
9
9 EFILE EX2 11.336482 13.443700 0.000000 ydZS�^�BqG
10 RAD 38.6888290000000 TH 7.79631890 AIR (93$� L zZ
10 EFILE EX1 11.336482 13.443700 13.697701 bMA��\_?��
11 CV 0.0000000000000 TH 0.00000000 AIR 8wf[*6V�wV
END IYG,n�t�!�
PHxU6UPqy�
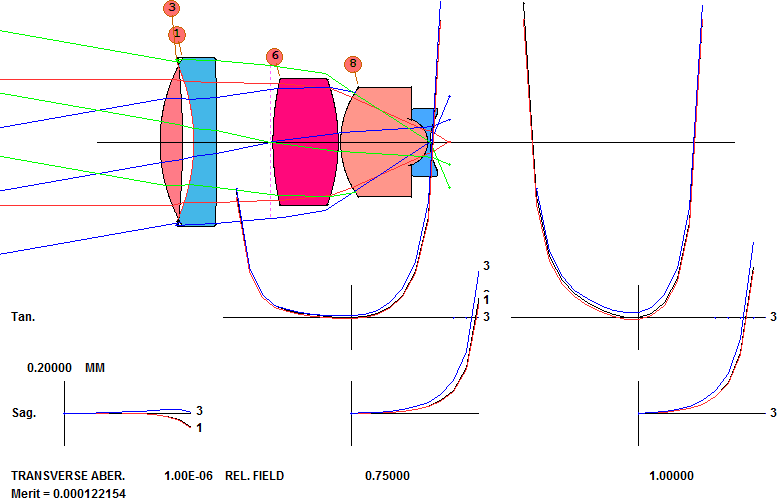
让我们制作一个可以有效控制三阶像差的优化MACro。 �%��&iY5A�
在EE编辑器中,输入(L6M1.MAC) �-:�V0�pb
PANT �>��h
R�q
VLIST RAD ALL VLIST TH ALL
+|w%}/N��
VLIST GLM 1 3 6 8 9 END }J�^�+66{�
zO�br�p��
AANT BJDSk#!J!{
M 1 1 A FNUM 0en
Bq>vr�
M 7.8 1 A BACK )N'-A��p$g
M 0 1 A DELF F�97HFt�6{
M 0 1 A SA3 �8[B0�[2�O
M 0 1 A CO3 g7l�?/�p[n
M 0 1 A TI3 ��Pu����q
M 0 1 A SI3 #xoF�c�jRE
M 0 1 A PETZ �`9`T,uJe�
M 0 1 A DI3 ?�*/1J~<(@
M 0 1 A PAC nB9�(�y�4�
M 0 1 A SAC �,]L�sX�"u
M 0 1 A PLC fo"�%4rk�L
M 0 1 A SLC ��lzb��A�x
END lD-��H�Q�d
bH �Nf>���
SNAP �j�U}iQ��M
SYNO 30 ]kir@NMv�>
Zs�to8wuf#
该MACro将改变所有设计变量并控制F/number ,离焦和后焦距,并同时以三阶像差校正为零作为目标。 输入VLIST RAD ALL将改变所有半径,VLIST TH ALL将改变所有厚度和空气间隔,本例中我们不建议使用VLIST GLM ALL命令,因为该命令将会改变透镜的材料,在这个例子中,我们必须单独声明表面。 �EEp~\^�-
我们运行这个MACro,得到了一个糟糕的结果! #�zed8I:w�
我们用命令查看三阶像差 &�~&oB;uR
THIRD oX��gi#(�y
SYNOPSYS AI>THIRD %�jh
gK�q
�2{9%E6�%#
ID FIVE-ELEMENT LENS 179 01-JUN-17 13:49:05 ��:\�"V5�
THIRD-ORDER ABERRATION ANALYSIS i�`7�(5L~`
FOCAL LENGTH ENT PUP SEMI-APER GAUSS IMAGE HT ~vscA��T�Q
50.804 25.400 8.958 �-%f�tPf�m
oU/�{<��gs
THIRD-ORDER ABERRATION SUMS SH5a&OVZhn
SPH ABERR COMA TAN ASTIG SAG ASTIG PETZVAL DISTORTION #/
HQ?3h]�
(SA3) (CO3) (TI3) (SI3) (PETZ) (DI3(FR)) j2`%�s��Bo
-9.657E-06 -0.00027 -3.991E-05 -6.235E-06 1.060E-05 -0.00056 ��s?7"i�E�
PARAXIAL CHROMATIC ABERRATION SUMS
��5_+pgJL
AX COLOR LAT COLOR SECDRY AX SECDRY LAT >*�h�3u7t�
(PAC) (PLC) (SAC) (SLC) �Zq�����"�
-0.00276 -0.00027 0.01062 0.00112 v
8B4%�1NE
SYNOPSYS AI> �'pHxO,vo�
pn�p)- a*7
结果显示 这些像差非常小。那么初始透镜的像差怎么样? $g!�iy'4n*
ID FIVE-ELEMENT LENS q^�eLbivVE
A(D3w�ctdr
THIRD-ORDER ABERRATION ANALYSIS :I���(d-,C
FOCAL LENGTH ENT PUP SEMI-APER GAUSS IMAGE HT m9mkZ:r(kV
50.800 25.400 8.957 L�k�]�W?
62 9�g_P�)
THIRD-ORDER ABERRATION SUMS K)#6&\�0tT
SPH ABERR COMA TAN ASTIG SAG ASTIG PETZVAL DISTORTION e�Z�|_wB'r
(SA3) (CO3) (TI3) (SI3) (PETZ) (DI3(FR)) c+ukV�n`�r
-0.01806 -0.03730 -0.04236 -0.08744 -0.10998 -0.01754 I#:�Dk?"O2
�NJ�myp!8
PARAXIAL CHROMATIC ABERRATION SUMS �M&�}��_3�
AX COLOR LAT COLOR SECDRY AX SECDRY LAT YM&����i��
(PAC) (PLC) (SAC) (SLC) 3a0%� �J�'
-0.01215 0.01518 0.00724 0.00478 �}t0J�I�3�
w�^�^�8*b<
这些像差要大得多 - 但初始透镜性能要好得多! 所以在像差平衡方面,不要试图将像差校正到极端状态。 �Iq�Ch�4y3
一般人们在设计透镜时,通常只关心两件事:图像是否清晰,是否在正确的位置。 �ke19(r Ch
然而,这些三阶像差在降低公差敏感度上有很重要的作用。 这是因为,当透镜制造偏差越大,三阶像差变化最快。 因此,我们定义了一组可以放入AANT文件的八个定义像差的命令: �cuh Z_�l�
SAT COT ACD ACT ECD ECT ESA ECO ]Q -.Y-J/O
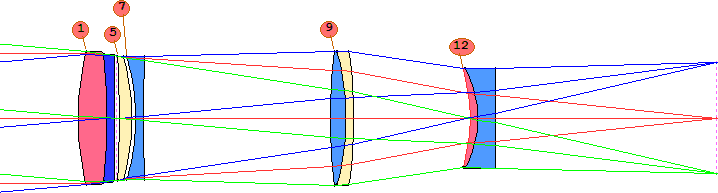
以下是如何使用这些像差来放宽透镜公差的示例。 我们优化了下面所示的透镜,并以目标波前权重0.05运行BTOL。 J]5�ZWo�%�
RLE m�1DrT>oN'
ID 8-ELEMENT TELEPHOTO 236 ��'iX �y?l
FNAME 'L6L2.RLE ' q"�u,r6ED
MERIT 0.145212E-01 LOG 236 �OWZ;X��}x
WAVL .6562700 .5875600 .4861300 �S�{nBQ�B<
APS 4 B=HE�i\55K
GLOBAL �3/Dis)
v8
h���$#|�s/
UNITS MM `k��-|G2��
OBB 0.000000 5.00000 25.40000 -0.88448 0.00000 0.00000 gR${S|Z#u4
25.40000 q{XeR�Q'/�
0 AIR \xK�hbpO�~
1 RAD 107.5431718565176 TH 11.00000000 ��h*��V~.H
1 N1 1.61726800 N2 1.62040602 N3 1.62755182 \�t]_UNGyW
1 CTE 0.630000E-05 (�!%�w���
1 GTB S 'SK16 ' .>NPg�d��I
2 RAD -349.2713337442812 TH 3.00000000 =� ,�c!��V
2 N1 1.69220502 N2 1.69894060 N3 1.71544645 )CD-cz�6n
2 CTE 0.790000E-05 �#�ds@!u+&
2 GTB S 'SF15 ' >��M7�(<V�
3 RAD -2.9912862137173E+05 TH 1.00000001 AIR o�k{
F=��z
TH 1.00000001 AIR }�1|�F��ES
TH 5.00000000 z�YEb#*Kar
5 N1 1.51981155 N2 1.52248493 N3 1.52859442 q>�m�[vvt"
5 CTE 0.820000E-05 zKQXmyO���
5 GTB S 'K5 ' I�Z@M�
�K
6 RAD -90.4865897926554 TH 1.35282284 AIR @�@& ?��,3
7 RAD -87.2286998720792 TH 3.00000000 %:�8��XZf
7 N1 1.61502503 N2 1.62003267 N3 1.63207204 %[OZ;q& X�
7 CTE 0.820000E-05 cHon' tS�
7 GTB S 'F2 ' .[o`Tl�G�%
8 RAD 491.7930148457936 TH 73.15839431 AIR �wu3p2#-Z�
9 RAD 218.6390525466715 TH 6.00000000 �SHQ�gI<D7
9 N1 1.61502503 N2 1.62003267 N3 1.63207204 Bkdt[qDn5P
9 CTE 0.820000E-05 cG!�d�Mab(
9 GTB S 'F2 ' Muo�k">#3.
10 RAD -99.1627747164714 TH 3.00000000 �X��hmUtbs
10 N1 1.51981155 N2 1.52248493 N3 1.52859442 ��lL�*"N|Y
10 CTE 0.820000E-05 �-�+W��E�9
10 GTB S 'K5 ' Z`���>�m��
11 RAD -182.3746109793576 TH 45.48880137 AIR c3J1�2+~;�
12 RAD -67.5075897018110 TH 3.00000000 ����q{pa _
12 N1 1.61726800 N2 1.62040602 N3 1.62755182 S5e"}.]|�
12 CTE 0.630000E-05 0F<$Z�be2B
12 GTB S 'SK16 ' YXDu��hrs}
13 RAD -40.7083005956173 TH 7.00000000 �N�a<);�Pg
13 N1 1.61502503 N2 1.62003267 N3 1.63207204 �7w.9PN�hy
13 CTE 0.820000E-05 !JbWxGN`jn
13 GTB S 'F2 ' *#j_nN�M4�
14 RAD -832.2479524920537 TH 86.31660394 AIR d?A!0�;(*�
14 CV -0.00120156 sfs2�ki�H�
14 UMC -0.10260000 ;]�_h")4"c
14 TH 86.31660394 > m��E�B,�
14 YMT 0.00000000 �pQk��@
+r
15 CV 0.0000000000000 TH 0.00000000 AIR ]��\*��_}�
END VJgYXPE�
`
{t�Ux�R�X�
一些公差降低得非常快速,如下表所示,其中标称数据是针对此透镜的。 N���ZZc[P
将透镜位置保持公差很紧导致制造成本将会很昂贵。(看看表面7上的中心公差。)所以我们按如下方式进行: Y,�{pG]B$w
1.运行命令THIRD SENS,查看这些参数的当前值。 1B~[L 5p9�
THIRD SENS cg^�=F�_�h
ID 8-ELEMENT TELEPHOTO �[n&SA�]a�
)^m"f��Q+�
NORMALIZED 3RD-ORDER ANALYSIS OF TOLERANCE SENSITIVITY PBgU�/zVn
I[b��Wd{i:
SS OF SA3 BY SURFACE (SAT) = 85.107903 VT�K �+a�I
SS OF CO3 BY SURFACE (COT) = 21.404938 �3y y��VI#
SS OF CO3/YDC BY SURFACE (ACD) = 0.007657 sv2�XD}}�
SS OF CO3/TILT BY SURFACE (ACT) = 73.889722 �(�PSL�[�P
SS OF CO3/YDC BY ELEMENT (ECD) = 0.003941 f�zzk#��jU
SS OF CO3/TILT BY ELEMENT (ECT) = 31.259708 L��4v26*�P
SS OF SA3 BY ELEMENT (ESA) = 1.944190 ���Jwdv�Y]
SS OF CO3 BY ELEMENT (ECO) = 0.492351 6)_h'�v<|M
��UHX,���s
2.由于我们主要关注中心误差,我们可能会尝试降低ECD的值,即当元件偏心变化时,CO3的变化。 让我们添加到AANT文件(在L6M2.MAC中)的行 ��8B3�C[�?
M .001 100 A ECD5 8�j}o\�!�H
��H� Yw7*�
由于ECD已经是一个很小的数字(与列表中的其他数字相比),我们给它一个很高的权重,因此它对评价函数产生了影响。 请记住,我们不能简单地将所有这些值都定为零,因为通常不能设计没有任何像差的透镜元件,并且没有光焦度。 而且,这些量以不明显的方式耦合。 例如,如果减少SAT的值,您可能会发现COT也变小了。 �'L��C0hoV
你不能给他们各自分配一个独立的值,并期望程序可以自己找到这样的组合。 因此,明智的做法是一次一个地进行,直到找到最适合您透镜的参数。 在这个例子中,控制ECD的值,即可得到透镜。 �uI��R/^o�
THIRD SENS R[}fr36>/
ID 8-ELEMENT TELEPHOTO N�$M:&m3^�
NORMALIZED 3RD-ORDER ANALYSIS OF TOLERANCE SENSITIVITY SS OF SA3 BY SURFACE (SAT) = 7.027782
+����f�'@
SS OF CO3 BY SURFACE (COT) = 4.876613 rb�I 7�
3'
SS OF CO3/YDC BY SURFACE (ACD) = 0.001649 oVY_|Uu�jG
SS OF CO3/TILT BY SURFACE (ACT) = 19.621736 CB`��GiH/j
SS OF CO3/YDC BY ELEMENT (ECD) = 0.001064 ���YB3�76/
SS OF CO3/TILT BY ELEMENT (ECT) = 8.602740 �GB}�!7W"�
SS OF SA3 BY ELEMENT (ESA) = 0.185606 co{�i�~['u
SS OF CO3 BY ELEMENT (ECO) = 0.127624 ��X-��`�PF
A}_0i�wG�
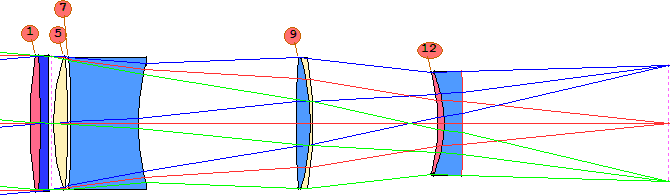
即使我们只针对其中一个(ECD),请注意所有值都已更改。 该透镜的公差列于上表中的情况A.。显然,现在的公差要宽松得多,尽管这对制造商来说仍然是一个挑战。 让我们再试一试。 这次我们将ACT的值定为7.0,即标称值的1/10。 ��/g$8�J�L
M 7 1 A ACT �qq>Qi�(�>
.q�rS[�� w
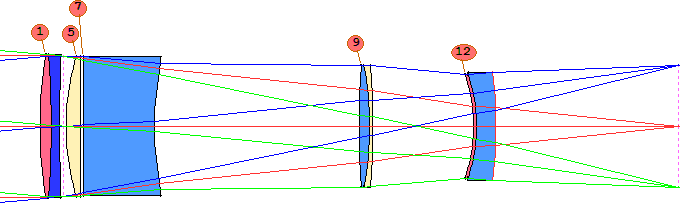
透镜视图如下: U+:M�u]97�
公差列在上面的案例B中。 对于一些公差来说,这可能是更好的预估。 (我们忽略了本课程的可制造性问题:某些元件太薄,应该使用ACM监视器进行控制。) 0](�V@F"�~
您选择控制的数量取决于您想要影响的公差。 例如,空气间隔的公差可以响应对ESA数量的控制。 另一方面,透镜厚度公差可能对SAT更好地响应。 您必须了解您的透镜,并尝试使用这些工具,以找到最佳目标和最佳BTOL预估。 Bs�^�p!4=
有时这些量的作用是增加评价函数。 通常这不是一个好主意,因为如果像质变得更糟,公差通常会变得更紧。 但是,本课中工具的放松效果有时会超过这种效果,无论如何都会使公差更加宽松。 当然,这只能在一定程度范围之内,如果评价函数太大,你的评价函数应该要求一个要求较低的值。 Q$��A;Fk}-
我们无法保证任何这些像差目标在任何特定情况下都能起作用,但经验表明它们肯定值得一试。 您的公差可以放宽2到10倍。 qE�M,~:lTn
最后,我们提到控制单个元件灵敏度的另一种非常有效的方法是使用SECTION像差。 虽然本课程中讨论的数量适用于所有表面或元件,因此非常易于使用,但SECTION像差仅适用于您指定的表面范围。 如果一个元件仍然被分配了一个非常紧的中心公差,即使你尝试了本节中给出的目标 - 如果某些元件的公差变得更宽松但问题元件的公差变得更紧,可能会发生这种情况 - 你可能只控制那个含彗差或球差的元件。 这使您可以精确控制所需的像差,并且通常值得采取额外步骤。 例如,如果表面13和14处的元件非常敏感,您可以尝试 &<t`EI];)4
M 0 .1 A SECTION SA3 13 14 ~9c�� �j�c
�l��f_�q6y
并尝试目标和权重直到获得最佳效果。
|