摘要 @��";�z?xj �g`�KVF"�8 目前,大多数创新的增强和混合现实设备都是基于光波导或波导配置,并结合微观结构来耦合光的进入和输出。VirtualLab Fusion技术能够通过应用我们独特的物理
光学方法对这些器件进行详细的建模,其中包括所有感兴趣的影响因素(如相干性、偏振和衍射)。我们通过建立一个简单的“HoloLens 1”型(1D-1D出瞳放大器)布局模型来演示这种能力,该设备能够在32°×18°的
视场下引导光传输。
Zmf\��A��� EK:!.�Fl� 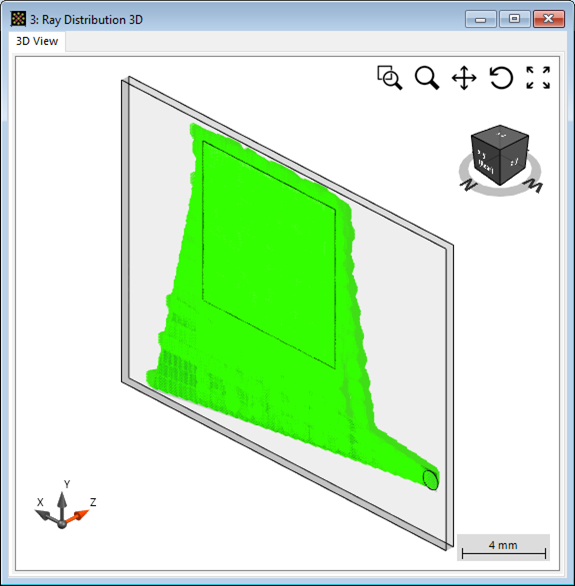 w�yO@oi
Vn 5m")GWQaP@ 建模任务 �t��N|sHgs G!~����[+B
w�yO@oi
Vn 5m")GWQaP@ 建模任务 �t��N|sHgs G!~����[+B 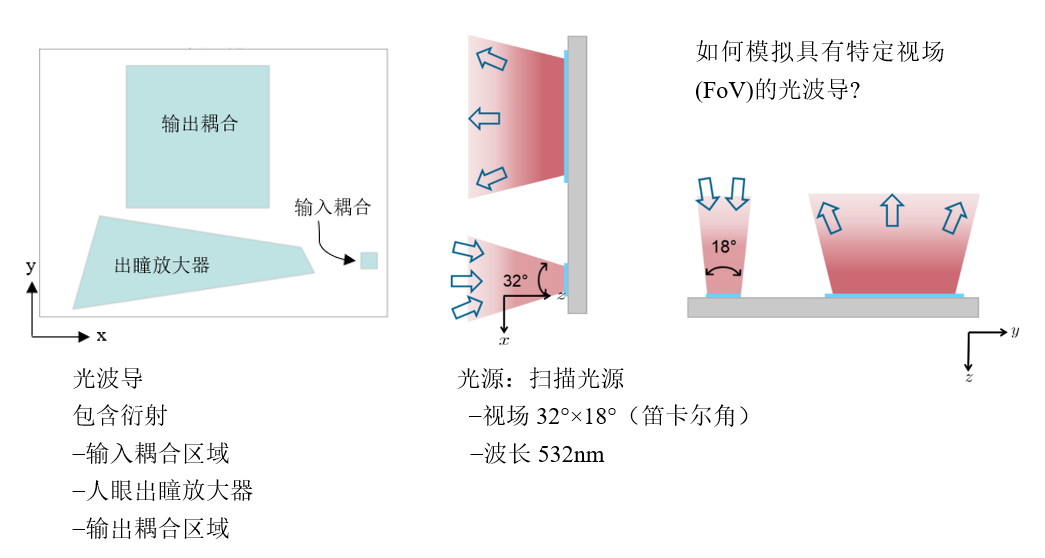 @F_#d)+%> q|J3�]F !n 光波导的工作原理 �4�1�%B%K* t?��^C9(;6
@F_#d)+%> q|J3�]F !n 光波导的工作原理 �4�1�%B%K* t?��^C9(;6 光波导使用内部全反射(TIR)来“捕获”光波导板内的光。为此,采用
光栅耦合入射和出射光,并确保满足内部全反射条件。
Ij�>x3L\�- dbGW`_�zQ4 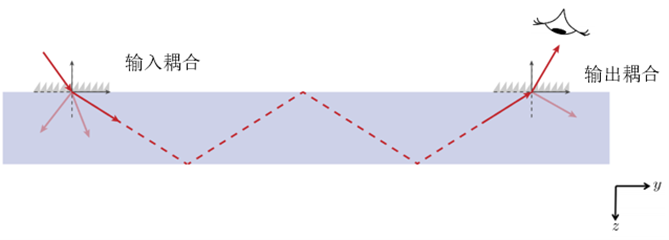 [0��7�N�<< SJ1
1LF3�)
[0��7�N�<< SJ1
1LF3�) 出瞳放大光栅的功能是在某一个方向上(这里是x方向)复制耦合的光瞳,以扩散出瞳,或者换句话说生成人眼观察区域。
|Ia3b�V��W 在这种类型的设置中,输出耦合光栅不仅负责将光输出耦合到观察者,而且还负责光瞳在第二个方向(这里是y方向)的扩散。
4VE7%�.z+� 这种分离式的光瞳扩散是“HoloLens 1”型布局的特征。
C)�>
])�'S <Vp7�G%"'W 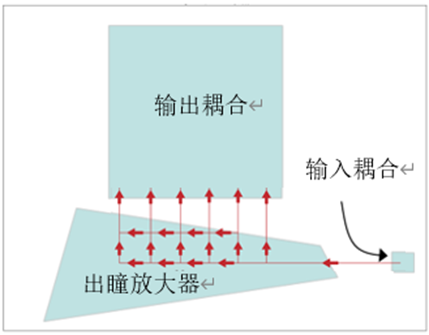 d�)|�{iUcW F�,�#)�8>O 布局设计工具 11}�f�P�WK
d�)|�{iUcW F�,�#)�8>O 布局设计工具 11}�f�P�WK 为了设置这种光波导的横向布局,可以使用VirtualLab的Layout Design工具(仅在光波导工具箱中可用)。
nGA'\+zj�L 此使用案例的
参数对应于默认配置。
8X��wAKN:f 该工具根据给定的规格的入射光和人眼观察区域提供了一个光波导的光学参数设置。特别注意的是,光栅区域的横向位置和延伸以及光栅周期都是自动设置的。
�?4=8z8((! 定义参数后,单击“创建结果”按钮,然后会创建出光学参数设置和相应的k布局图。
5,!,mor$�] ��|� ]`gps 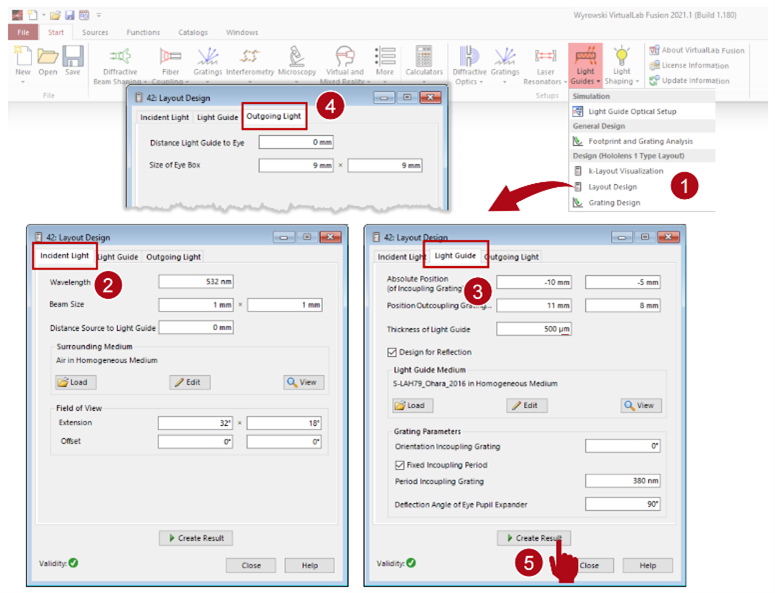 �+�~J?�/� �.)^@[yrkz 查看k布局 'j�=7'aX>K
�+�~J?�/� �.)^@[yrkz 查看k布局 'j�=7'aX>K k布局图可以与光波导
系统一起作为布局设计工具的副产品创建,也可以通过菜单中的条目独立生成。
��F�Kf��lN 可以配置以下参数:
pYV$�sDlD� 波长;
�mg)lr&-�b 环境和平板的
材料;
uf�,�4GPo, 视场角范围;
<b�y}�/lF0 光栅周期和方向。
'2�=u<�a B 结果图包含以下信息(在k域中):
^GdU$%aa� 描述材料内部传播条件的圆(可用方向和k值)。
s}A)sBsaP3 在某些光栅区域后入射光和衍射光的视场延伸、形状和位置。
rAD5n�,�M] 由光栅引入的视场位移的说明。
+v�%V1lf^~ +]O�f f^�s 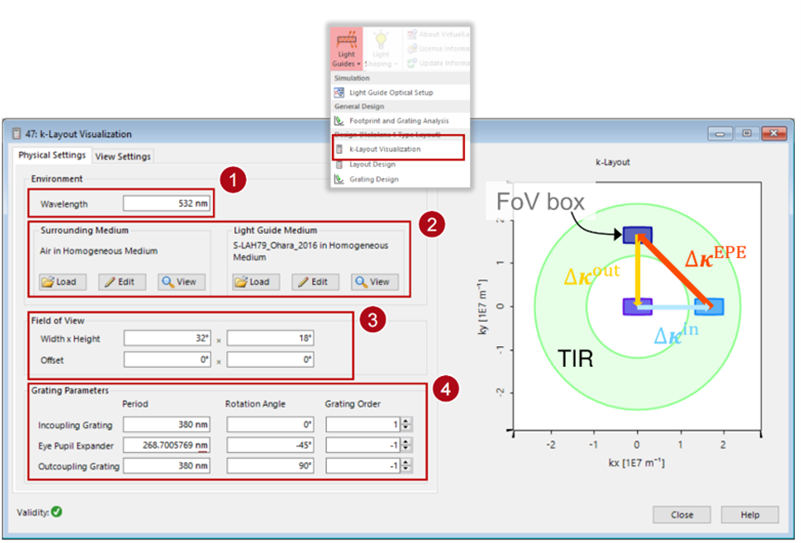 I�Th1|�yP
I�Th1|�yP 任何参数的调整都会相应地改变图像。
Xg.�'<.!g0 K�g&{�
?&� 光波导表面布局 w�z�B*M}�3 几何布局显示了第一平面表面上的3个光栅:
=9n$�at$l@ ��1QM*oj: 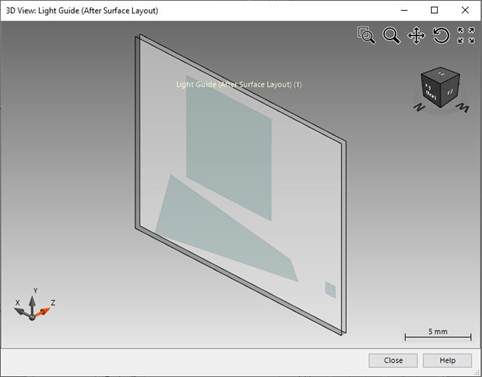 N)A�?*s'v~ ��E!'H,#"P
N)A�?*s'v~ ��E!'H,#"P 光栅#1:耦入光栅
[@�[!e�s�C 光栅#2:扩散光栅
''�!pvx�A� 光栅#3:耦出光栅
����U7J0& �9�}�kN�9u 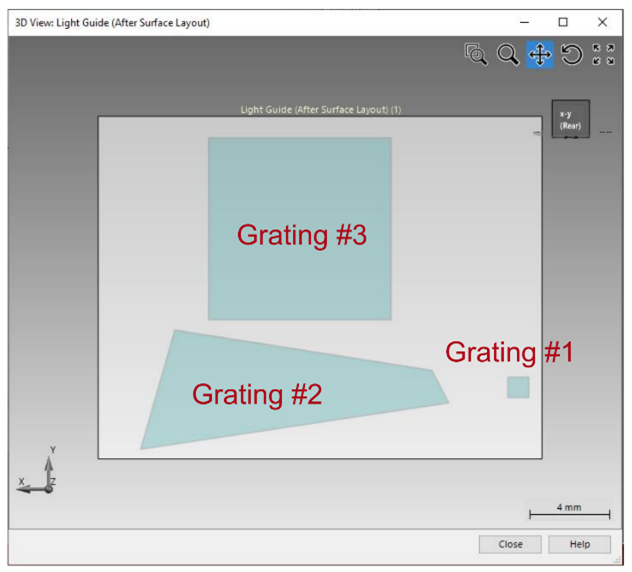 3ydOB�e�Y� Fa�^5�.�p� 光栅#1:输入光栅 9Qp39(l�: yyh
L]Uq"= %a+X�\\v2�
3ydOB�e�Y� Fa�^5�.�p� 光栅#1:输入光栅 9Qp39(l�: yyh
L]Uq"= %a+X�\\v2� 耦入光栅被定义在一个矩形区域内。定义光栅区域的一般工作流程是:
Ui�S9u��Gj �mn�L
\c�' 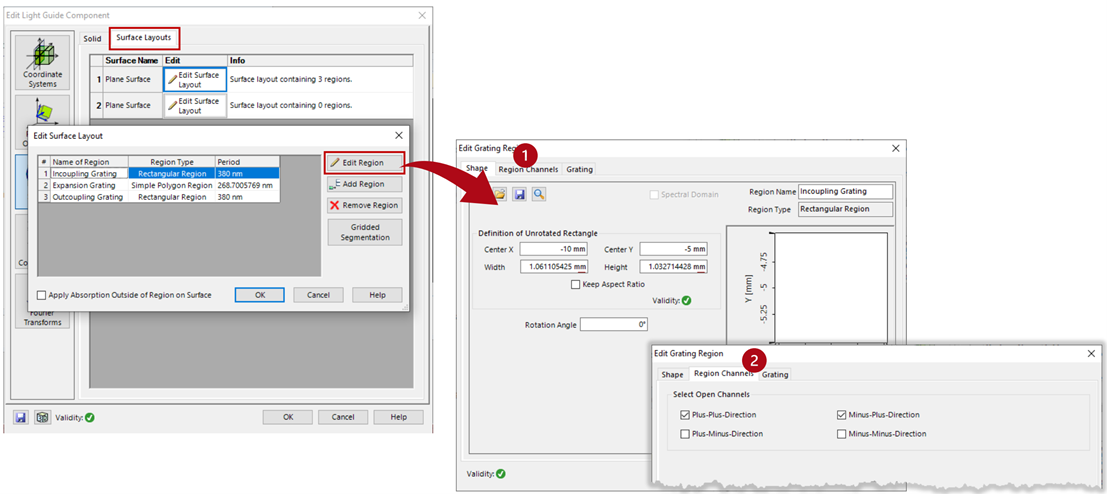 "+s#!�Fh *
"+s#!�Fh * 1. 确定区域的形状和直径;
:7p0JG��d 2. 选择区域通道;
"!XeK|��Wi 3. 定义光栅的周期和方向;
&�$ �� �F0 4.指定传播级次(从正面和背面);
c"t�1E-Nsk 5.指定透射效率和反射效率。
ed*C��x~rT c��;e-[F�7 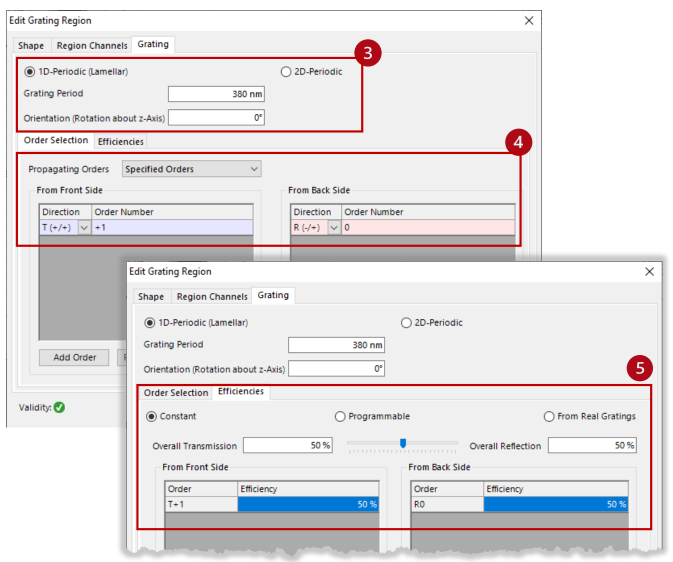 &�oiX�/UaY b�].�:��2� 光栅#2:简单多边形区域中的扩散光栅 8):�I< }s# hC<X\yxe�
&�oiX�/UaY b�].�:��2� 光栅#2:简单多边形区域中的扩散光栅 8):�I< }s# hC<X\yxe� 扩散光栅被定义在一个多边形形状的区域中。所需区域通道为‒//+,因此只指定照射到光栅背面的光的反射级次。
?UQVmE&��� 3�tI=?��E# 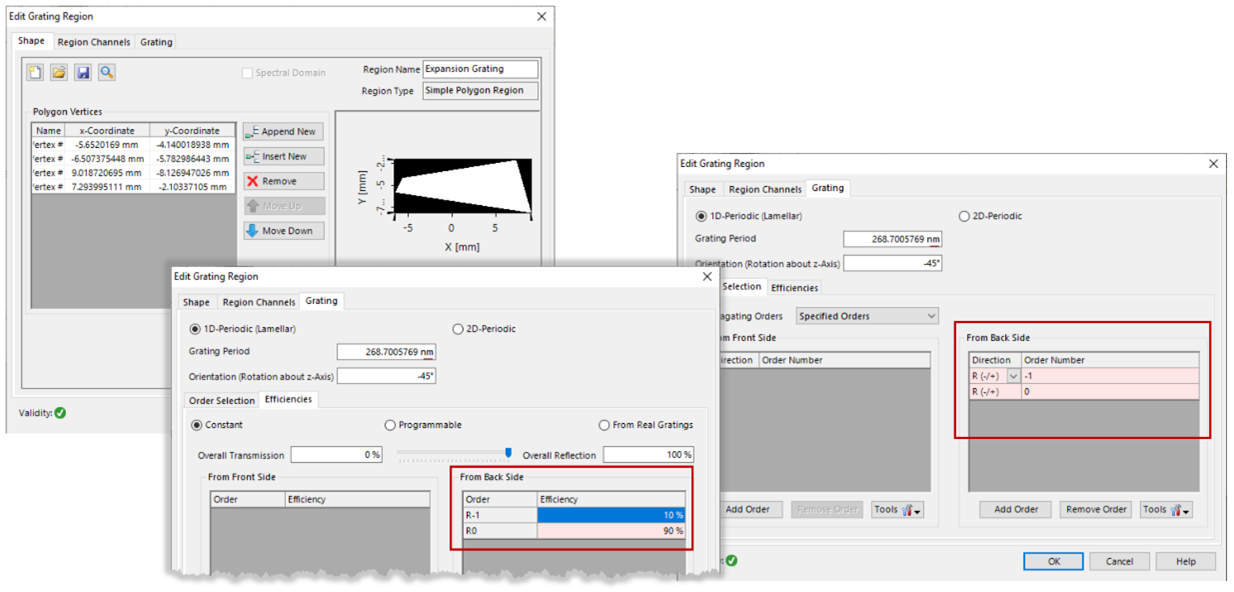 �#�/@U�|g �W5(t+$L.� 光栅#3:输出光栅 �lD��V8��< �`�|�w�H�= m�p0p#8txi
�#�/@U�|g �W5(t+$L.� 光栅#3:输出光栅 �lD��V8��< �`�|�w�H�= m�p0p#8txi 输出耦合光栅被定义在一个矩形区域内。
�JU:!�l�yd 区域通道‒/+和‒/‒需要激活负责扩散和输出耦合的级次。
lO8.Q�"mxo ?�AP2O�psl 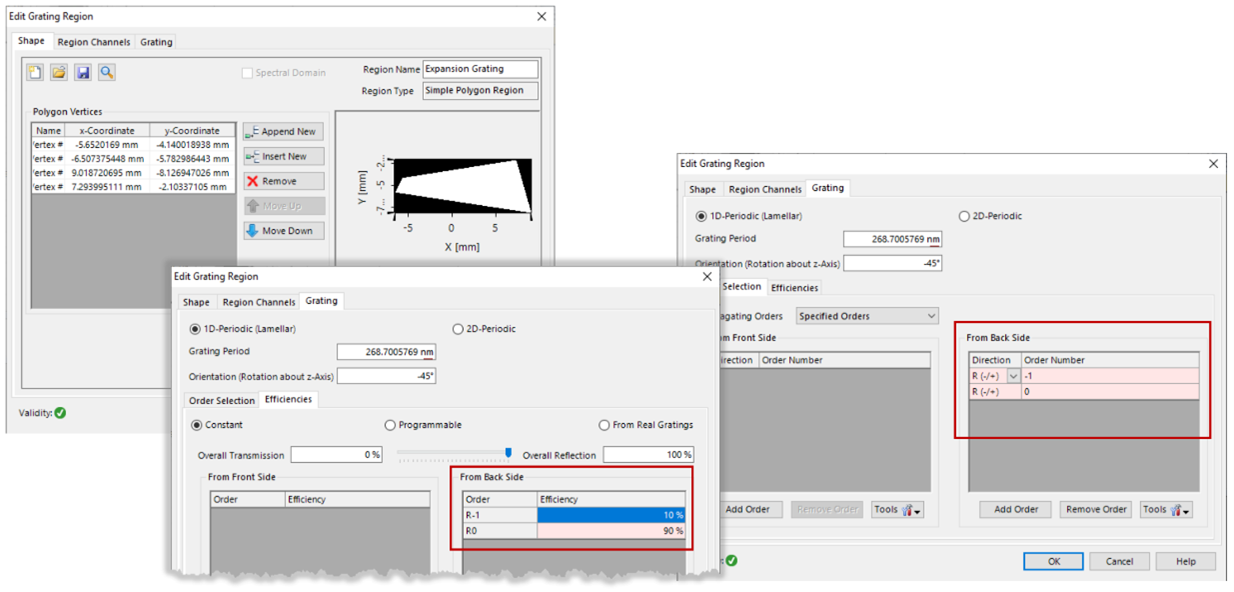 ���\�v]}� ��
�m3�
;� 结果:三维系统中的光线追迹 i9k7rE�W^� ��z��c]�F�
���\�v]}� ��
�m3�
;� 结果:三维系统中的光线追迹 i9k7rE�W^� ��z��c]�F� 有视场中心角度的系统视图光线:
�V�P�\HPSp KM����4w�{ 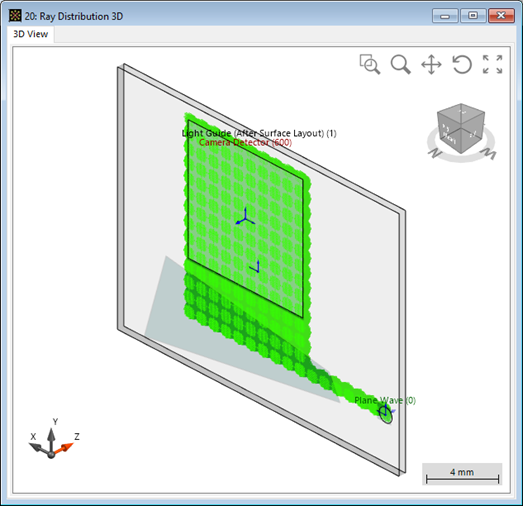 KSVIX!�EsX rui}a�=rs
KSVIX!�EsX rui}a�=rs 32°×18°扫描
光源(9种模式,不同颜色)输入的系统视图光线:
p+;Re2�Uyg f2�_LfbvH 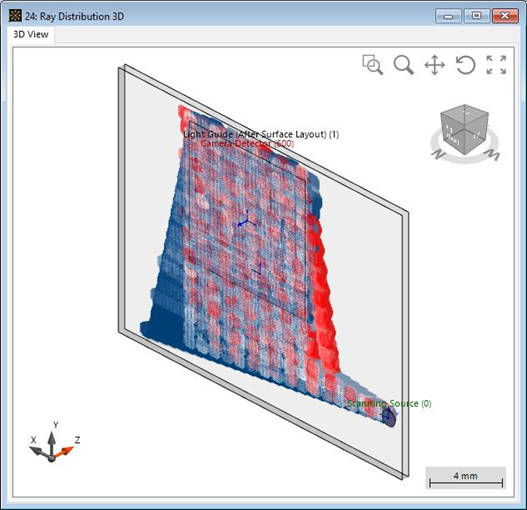 *�jG�B�/ y ��x�@2�rfs 结果:场追迹(真实颜色视图) J"|�)?$d]z 64�s+�
0�}
*�jG�B�/ y ��x�@2�rfs 结果:场追迹(真实颜色视图) J"|�)?$d]z 64�s+�
0�} 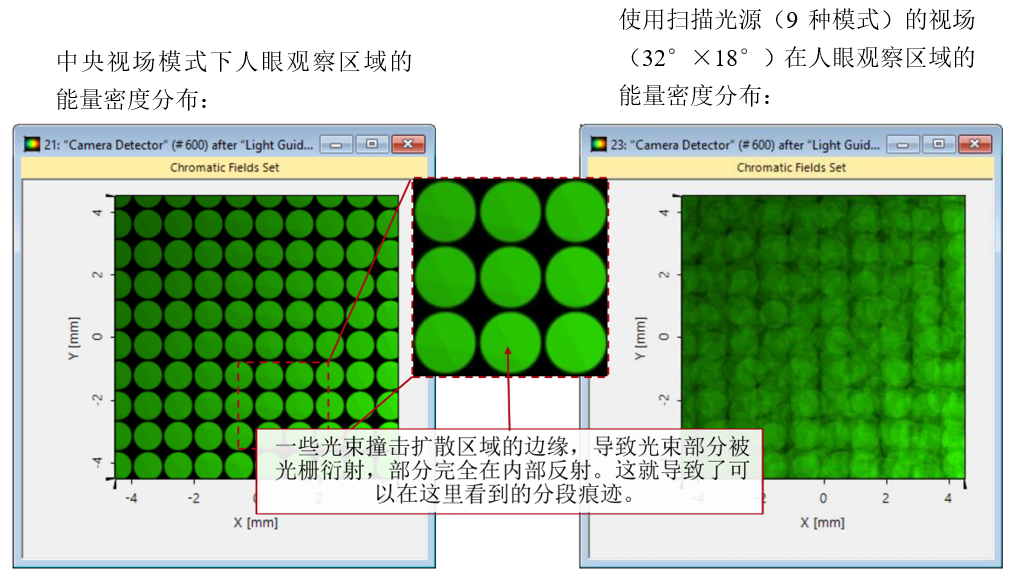 CO�Fs?�L.` 'L�FHZ&-�� 结果:场跟踪(伪颜色视图) �Xn�"n5�=M PTA;a��0A�
CO�Fs?�L.` 'L�FHZ&-�� 结果:场跟踪(伪颜色视图) �Xn�"n5�=M PTA;a��0A� 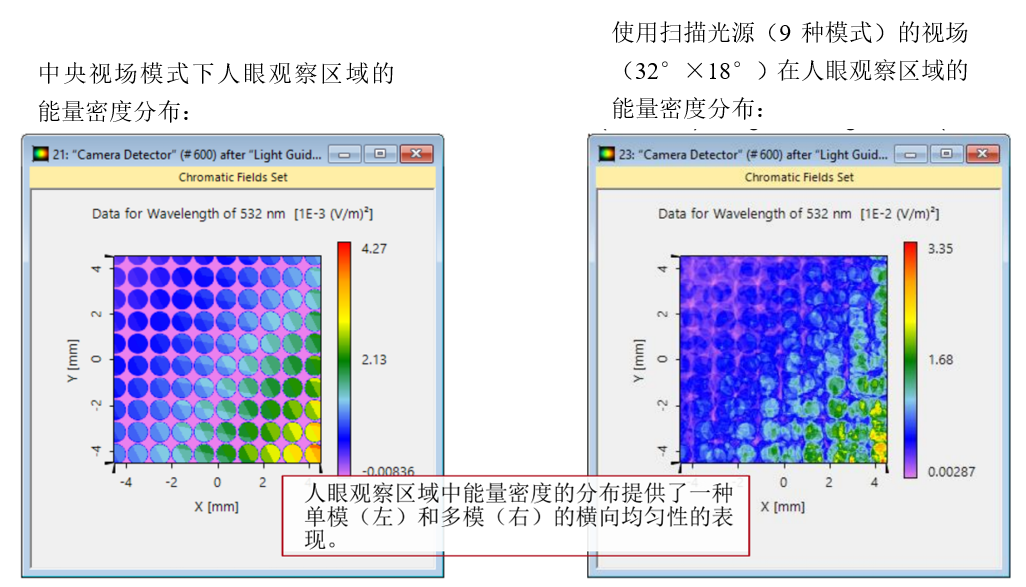 f1�=BBQY
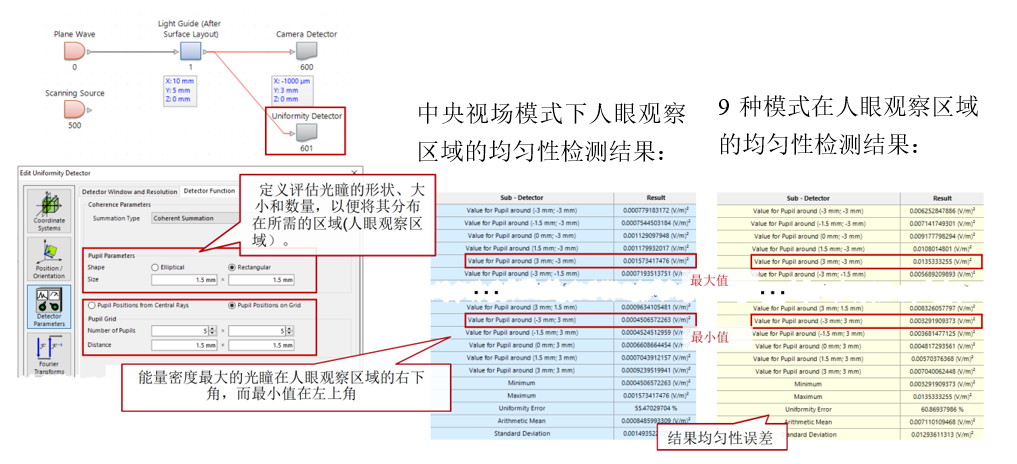
> ,Ng3�!2&$e 横向均匀性评价 O �4�N_lr~ 52�m^jT Sx
f1�=BBQY
> ,Ng3�!2&$e 横向均匀性评价 O �4�N_lr~ 52�m^jT Sx 为了评估人眼观察区域内的横向均匀性,提供了均匀性检测器,它可以在元件列表中找到(在探测器(Detectors)>评价函数(Merit Functions)>均匀性检测器下(Uniformity Detector)。该探测器能够研究在特定位置的特定区域(如人眼观察区域)的横向能量密度分布。
��3k�;U�#H �)&+_�T+�\